Zylinderkoordinaten: Unterschied zwischen den Versionen
| (48 dazwischenliegende Versionen von 3 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
| + | {{Navigation|before=[[Das kartesische Koordinatensystem]]|overview=[[Orthogonale Koordinatensysteme:Übersicht|Orthogonale Koordinatensysteme]]|next=[[Kugelkoordinaten]]}} | ||
[[Image:Zylinderkoordinaten.png|400px|thumb|<caption>Zylinderkoordinaten</caption>]] | [[Image:Zylinderkoordinaten.png|400px|thumb|<caption>Zylinderkoordinaten</caption>]] | ||
| − | Das Zylinderkoordinatensystem ermöglicht insbesondere dann eine kompakte Beschreibung von Positionen und gerichteten Größen im Raum, wenn man es mit zylinderförmigen Anordnungen zu tun hat. Das elektrische Feld einer Linienladung, die näherungsweise als zylinderförmig angenommen werden kann, lässt sich zum Beispiel wesentlich einfacher in Zylinder- als in kartesischen Koordinaten beschreiben (vgl. Beispiel unten). Es gibt zahlreiche weitere Beispiele wie die Beschreibung des elektrischen Feldes einer zylinderförmigen Raumladung oder die Beschreibung des magnetischen Feldes eines stromdurchflossenen Leiters. Bei dem Zylinderkoordinatensystem handelt es sich um ein [[Krummlinige orthogonale Koordinatensysteme|krummliniges orthogonales Koordinatensystem]]. | + | Das Zylinderkoordinatensystem ermöglicht insbesondere dann eine kompakte Beschreibung von Positionen und gerichteten Größen im Raum, wenn man es mit zylinderförmigen Anordnungen zu tun hat. Das elektrische Feld einer Linienladung, die näherungsweise als zylinderförmig angenommen werden kann, lässt sich zum Beispiel wesentlich einfacher in Zylinder- als in [[kartesische Koordinaten|kartesischen Koordinaten]] beschreiben (vgl. Beispiel unten). Es gibt zahlreiche weitere Beispiele wie die Beschreibung des elektrischen Feldes einer zylinderförmigen Raumladung oder die Beschreibung des magnetischen Feldes eines stromdurchflossenen Leiters. Bei dem Zylinderkoordinatensystem handelt es sich um ein [[Krummlinige orthogonale Koordinatensysteme|krummliniges orthogonales Koordinatensystem]]. |
Bei den Zylinderkoordinaten wird ein Punkt <math>P</math> im Raum durch die drei Koordinaten <math>\rho</math>, <math>\varphi</math> und <math>z</math> beschrieben. Dabei bleibt die <math>z</math>-Achse des kartesischen Koordinatensystems unverändert erhalten. <math>\rho</math> (je nach Quelle auch als <math>r</math> bezeichnet) gibt den Abstand zur <math>z</math>-Achse an und <math>\varphi</math> bezeichnet den Winkel zum betrachteten Punkt. Dabei wird <math>\varphi</math> ausgehend von der positiven <math>x</math>-Achse in Richtung der positiven <math>y</math>-Achse gezählt. Somit ist der positiven <math>x</math>-Achse der Winkel <math>\varphi=0</math> und der negativen <math>x</math>-Achse der Winkel <math>\varphi = \pi</math> zugeordnet. | Bei den Zylinderkoordinaten wird ein Punkt <math>P</math> im Raum durch die drei Koordinaten <math>\rho</math>, <math>\varphi</math> und <math>z</math> beschrieben. Dabei bleibt die <math>z</math>-Achse des kartesischen Koordinatensystems unverändert erhalten. <math>\rho</math> (je nach Quelle auch als <math>r</math> bezeichnet) gibt den Abstand zur <math>z</math>-Achse an und <math>\varphi</math> bezeichnet den Winkel zum betrachteten Punkt. Dabei wird <math>\varphi</math> ausgehend von der positiven <math>x</math>-Achse in Richtung der positiven <math>y</math>-Achse gezählt. Somit ist der positiven <math>x</math>-Achse der Winkel <math>\varphi=0</math> und der negativen <math>x</math>-Achse der Winkel <math>\varphi = \pi</math> zugeordnet. | ||
| − | Die Richtung der Einheitsvektoren <math>\vec{\textbf{e}}_\rho</math> und <math>\vec{\textbf{e}}_\varphi</math> hängt von der Position des betrachteten Punktes ab. Die nebenstehende Abbildung verdeutlicht, dass <math>\vec{\mathbf{e}}_\varphi</math> immer tangential zu dem Kreisbogen (<math>\varphi</math>-[[Koordinatenlinie]]) im Punkt <math>P</math> verläuft und <math>\vec{\mathbf{e}}_\rho</math> immer orthogonal auf diesem Kreisbogen steht. Der Einheitsvektor <math>\vec{\textbf{e}}_z</math> (vgl. [[kartesische Koordinaten]]) zeigt unabhängig vom betrachteten Punkt im Raum immer in dieselbe Richtung. | + | Die Richtung der [[Einheitsvektoren]] <math>\vec{\textbf{e}}_\rho</math> und <math>\vec{\textbf{e}}_\varphi</math> hängt von der Position des betrachteten Punktes ab. Die nebenstehende Abbildung verdeutlicht, dass <math>\vec{\mathbf{e}}_\varphi</math> immer tangential zu dem Kreisbogen (<math>\varphi</math>-[[Koordinatenlinie]]) im Punkt <math>P</math> verläuft und <math>\vec{\mathbf{e}}_\rho</math> immer orthogonal auf diesem Kreisbogen steht. Der Einheitsvektor <math>\vec{\textbf{e}}_z</math> (vgl. [[kartesische Koordinaten]]) zeigt unabhängig vom betrachteten Punkt im Raum immer in dieselbe Richtung. |
Betrachtet man ausschließlich die <math>x</math>-<math>y</math>-Ebene ohne die <math>z</math>-Achse, so handelt es sich um '''Polarkoordinaten'''. | Betrachtet man ausschließlich die <math>x</math>-<math>y</math>-Ebene ohne die <math>z</math>-Achse, so handelt es sich um '''Polarkoordinaten'''. | ||
| Zeile 14: | Zeile 15: | ||
</math> | </math> | ||
Für die <math>y</math>-Koordinate kann analog verfahren werden und die <math>z</math>-Koordinate bleibt erhalten. Umgekehrt lassen sich auch Zylinderkoordinaten aus gegebenen kartesischen Koordinaten berechnen, die entsprechenden Transformationsgleichungen sind in der folgenden Tabelle angegeben: | Für die <math>y</math>-Koordinate kann analog verfahren werden und die <math>z</math>-Koordinate bleibt erhalten. Umgekehrt lassen sich auch Zylinderkoordinaten aus gegebenen kartesischen Koordinaten berechnen, die entsprechenden Transformationsgleichungen sind in der folgenden Tabelle angegeben: | ||
| + | |||
{|cellpadding="10" | {|cellpadding="10" | ||
|rowspan="3" style="background-color:#dde6f3;"|Umrechnung von Zylinder-<br> in kartesische Koordinaten | |rowspan="3" style="background-color:#dde6f3;"|Umrechnung von Zylinder-<br> in kartesische Koordinaten | ||
| Zeile 22: | Zeile 24: | ||
&\text{mit}& | &\text{mit}& | ||
0 &\leq \rho < \infty | 0 &\leq \rho < \infty | ||
| + | \end{align} | ||
| + | </math> | ||
| + | |rowspan="3" style="background-color:#dde6f3;"|Umrechnung von kartesischen-<br>in Zylinderkoordinaten | ||
| + | |style="background-color:#c9d7ec"| | ||
| + | <math> | ||
| + | \begin{align} | ||
| + | \rho &=\sqrt{x^2+y^2} | ||
\end{align} | \end{align} | ||
</math> | </math> | ||
| Zeile 31: | Zeile 40: | ||
&\text{mit}& | &\text{mit}& | ||
0 &\leq \varphi < 2 \pi | 0 &\leq \varphi < 2 \pi | ||
| + | \end{align} | ||
| + | </math> | ||
| + | |style="background-color:#c9d7ec"| | ||
| + | <math> | ||
| + | \begin{align} | ||
| + | \varphi &=\arctan\frac{y}{x}\ \text{wenn}\ x>0 | ||
\end{align} | \end{align} | ||
</math> | </math> | ||
| Zeile 43: | Zeile 58: | ||
\end{align} | \end{align} | ||
</math> | </math> | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
|style="background-color:#c9d7ec"| | |style="background-color:#c9d7ec"| | ||
<math> | <math> | ||
| Zeile 73: | Zeile 70: | ||
\vec{\textbf{r}} = \rho\,\vec{\textbf{e}}_\rho + z\,\vec{\mathbf{e}}_\mathrm{z} | \vec{\textbf{r}} = \rho\,\vec{\textbf{e}}_\rho + z\,\vec{\mathbf{e}}_\mathrm{z} | ||
</math> | </math> | ||
| − | Eine differentielle ([[Infinitesimale Weg-, Flächen-, und Volumenelemente|infinitesimale]]) Änderung des Ortsvektors <math>\mathrm{d}\vec{\textbf{r}}</math> ausgehend vom Punkt <math>P</math> um | + | Eine differentielle ([[Infinitesimale Weg-, Flächen-, und Volumenelemente|infinitesimale]]) Änderung des Ortsvektors <math>\mathrm{d}\vec{\textbf{r}}</math> ausgehend vom Punkt <math>P</math> um <math>\mathrm{d}\rho, \mathrm{d}\varphi, \mathrm{d}z</math> wird wie folgt beschrieben: |
:<math> | :<math> | ||
\mathrm{d}\vec{\textbf{r}} = | \mathrm{d}\vec{\textbf{r}} = | ||
| Zeile 82: | Zeile 79: | ||
Für weitere Umrechnungen und Zusammenhänge wird auf die [[Formelsammlung Koordinatensysteme]] verwiesen. | Für weitere Umrechnungen und Zusammenhänge wird auf die [[Formelsammlung Koordinatensysteme]] verwiesen. | ||
| − | Je nachdem, in welchen Bereichen (Intervallen) sich die Koordinaten bewegen, werden verschiedene Linien-, Flächen- und Volumenelemente beschrieben. Hält man z. B. alle Koordinaten bis auf <math>\varphi</math> konstant, so ergeben sich Kreise (vgl. [[Koordinatenlinien]]). Zur Verdeutlichung dieser Zusammenhänge kann das unten eingebundene Applet verwendet werden. | + | Je nachdem, in welchen Bereichen (Intervallen) sich die Koordinaten bewegen, werden verschiedene [[Wegelemente|Linien-]], [[Fächenelemente|Flächen-]] und [[Volumenelemente]] beschrieben. Hält man z. B. alle Koordinaten bis auf <math>\varphi</math> konstant, so ergeben sich Kreise (vgl. [[Koordinatenlinien]]). Zur Verdeutlichung dieser Zusammenhänge kann das unten eingebundene Applet verwendet werden. |
| + | |||
| + | {{Beispiel | ||
| + | |Titel=Elektrisches Feld einer Linienladung | ||
| + | |Inhalt= | ||
| + | Das elektrische Feld einer Linienladung <math>\lambda</math> zeigt radialsymmetrisch in den Raum und ist nur vom Abstand <math>\rho</math> abhängig. | ||
| + | |||
| + | [[Datei:Linienladung_und_E-feld.svg|500px]] | ||
| + | |||
| + | |||
| + | Damit kann die elektrische Feldstärke <math>\vec{\textbf{E}}</math> besonders kompakt in Zylinderkoordinaten angegeben werden: | ||
| + | :<math> | ||
| + | \vec{\textbf{E}}(\rho) = \frac{\lambda}{2\pi\rho\varepsilon_0} \vec{\textbf{e}}_\rho | ||
| + | </math> | ||
| + | }} | ||
| + | |||
| + | ====Applet==== | ||
| + | [[Datei:Applet_Zylinderkoordinaten.png|200px|gerahmt|links|verweis=Applet:Zylinderkoordinaten|[[Applet:Zylinderkoordinaten|Applet Zylinderkoordinaten]]]] | ||
<!-- alt | <!-- alt | ||
| Zeile 273: | Zeile 287: | ||
}} | }} | ||
--> | --> | ||
| − | + | <div style="clear:left;"> | |
| + | </div> | ||
{{Multimedia|Links= | {{Multimedia|Links= | ||
| − | |||
| − | |||
http://demonstrations.wolfram.com/ExploringCylindricalCoordinates/ '''Applet''': Punkt in Zylinderkoordinaten (engl./ free CDF-Player erforderlich) | http://demonstrations.wolfram.com/ExploringCylindricalCoordinates/ '''Applet''': Punkt in Zylinderkoordinaten (engl./ free CDF-Player erforderlich) | ||
| Zeile 291: | Zeile 304: | ||
}} | }} | ||
| + | <noinclude>==Literatur== | ||
| + | * Manfred Albach, ''Grundlagen der Elektrotechnik 1: Erfahrungssätze, Bauelemente, Gleichstromschaltungen'', 3. Auflage (Pearson Studium, 2011) | ||
| + | </noinclude> | ||
| − | + | [[Kategorie:Artikel]] | |
| + | [[Kategorie:Feedback]] | ||
Aktuelle Version vom 9. November 2017, 16:58 Uhr
| ← Zurück: Das kartesische Koordinatensystem | Übersicht: Orthogonale Koordinatensysteme | Vorwärts: Kugelkoordinaten → |

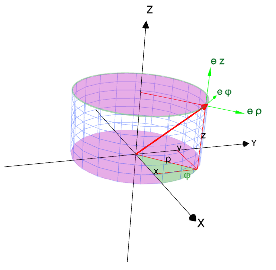
Das Zylinderkoordinatensystem ermöglicht insbesondere dann eine kompakte Beschreibung von Positionen und gerichteten Größen im Raum, wenn man es mit zylinderförmigen Anordnungen zu tun hat. Das elektrische Feld einer Linienladung, die näherungsweise als zylinderförmig angenommen werden kann, lässt sich zum Beispiel wesentlich einfacher in Zylinder- als in kartesischen Koordinaten beschreiben (vgl. Beispiel unten). Es gibt zahlreiche weitere Beispiele wie die Beschreibung des elektrischen Feldes einer zylinderförmigen Raumladung oder die Beschreibung des magnetischen Feldes eines stromdurchflossenen Leiters. Bei dem Zylinderkoordinatensystem handelt es sich um ein krummliniges orthogonales Koordinatensystem.
Bei den Zylinderkoordinaten wird ein Punkt  im Raum durch die drei Koordinaten
im Raum durch die drei Koordinaten  ,
,  und
und  beschrieben. Dabei bleibt die -Achse des kartesischen Koordinatensystems unverändert erhalten. (je nach Quelle auch als
beschrieben. Dabei bleibt die -Achse des kartesischen Koordinatensystems unverändert erhalten. (je nach Quelle auch als  bezeichnet) gibt den Abstand zur -Achse an und bezeichnet den Winkel zum betrachteten Punkt. Dabei wird ausgehend von der positiven
bezeichnet) gibt den Abstand zur -Achse an und bezeichnet den Winkel zum betrachteten Punkt. Dabei wird ausgehend von der positiven  -Achse in Richtung der positiven
-Achse in Richtung der positiven  -Achse gezählt. Somit ist der positiven -Achse der Winkel
-Achse gezählt. Somit ist der positiven -Achse der Winkel  und der negativen -Achse der Winkel
und der negativen -Achse der Winkel  zugeordnet.
zugeordnet.
Die Richtung der Einheitsvektoren  und
und  hängt von der Position des betrachteten Punktes ab. Die nebenstehende Abbildung verdeutlicht, dass
hängt von der Position des betrachteten Punktes ab. Die nebenstehende Abbildung verdeutlicht, dass  immer tangential zu dem Kreisbogen (-Koordinatenlinie) im Punkt verläuft und
immer tangential zu dem Kreisbogen (-Koordinatenlinie) im Punkt verläuft und  immer orthogonal auf diesem Kreisbogen steht. Der Einheitsvektor
immer orthogonal auf diesem Kreisbogen steht. Der Einheitsvektor  (vgl. kartesische Koordinaten) zeigt unabhängig vom betrachteten Punkt im Raum immer in dieselbe Richtung.
(vgl. kartesische Koordinaten) zeigt unabhängig vom betrachteten Punkt im Raum immer in dieselbe Richtung.
Betrachtet man ausschließlich die --Ebene ohne die -Achse, so handelt es sich um Polarkoordinaten.
Die Koordinaten und Einheitsvektoren der verschiedenen Koordinatensysteme können mit Hilfe von Transformationsgleichungen ineinander umgerechnet werden (siehe hierzu Formelsammlung Koordinatensysteme). Möchte man beispielsweise den Wert in kartesischen Koordinaten eines in Zylinderkoordinaten gegebenen Punktes  ermitteln, so bietet sich die Verwendung trigonometrischer Funktionen an. Aus der Abbildung wird ersichtlich, dass der Hypotenuse und der Ankathete in Bezug auf das durch gegebene rechtwinklige Dreieck entspricht. Damit gilt:
ermitteln, so bietet sich die Verwendung trigonometrischer Funktionen an. Aus der Abbildung wird ersichtlich, dass der Hypotenuse und der Ankathete in Bezug auf das durch gegebene rechtwinklige Dreieck entspricht. Damit gilt:

Für die -Koordinate kann analog verfahren werden und die -Koordinate bleibt erhalten. Umgekehrt lassen sich auch Zylinderkoordinaten aus gegebenen kartesischen Koordinaten berechnen, die entsprechenden Transformationsgleichungen sind in der folgenden Tabelle angegeben:
| Umrechnung von Zylinder- in kartesische Koordinaten |
|
Umrechnung von kartesischen- in Zylinderkoordinaten |
|
|
|
| ||
|
|
|





Aus der Abbildung wird außerdem ersichtlich, dass der Ortsvektor in Zylinderkoordinaten wie folgt beschrieben wird:

Eine differentielle (infinitesimale) Änderung des Ortsvektors  ausgehend vom Punkt um
ausgehend vom Punkt um  wird wie folgt beschrieben:
wird wie folgt beschrieben:

Für weitere Umrechnungen und Zusammenhänge wird auf die Formelsammlung Koordinatensysteme verwiesen.
Je nachdem, in welchen Bereichen (Intervallen) sich die Koordinaten bewegen, werden verschiedene Linien-, Flächen- und Volumenelemente beschrieben. Hält man z. B. alle Koordinaten bis auf konstant, so ergeben sich Kreise (vgl. Koordinatenlinien). Zur Verdeutlichung dieser Zusammenhänge kann das unten eingebundene Applet verwendet werden.
Das elektrische Feld einer Linienladung
|
 zeigt radialsymmetrisch in den Raum und ist nur vom Abstand
zeigt radialsymmetrisch in den Raum und ist nur vom Abstand 
 besonders kompakt in Zylinderkoordinaten angegeben werden:
besonders kompakt in Zylinderkoordinaten angegeben werden:
Applet
Multimediale Lehrmaterialien
|
|
http://demonstrations.wolfram.com/ExploringCylindricalCoordinates/ Applet: Punkt in Zylinderkoordinaten (engl./ free CDF-Player erforderlich) http://demonstrations.wolfram.com/CylindricalCoordinates/ Applet: Punkt in Zylinderkoordinaten (engl./ free CDF-Player erforderlich) |

Hilfreiche Links
|
|
http://www.math.wpi.edu/Course_Materials/MA2251C99/images/cylndrcl.gif Bild zu infinitesimalen Volumenelement in Zylinderkoordinatensystem http://lh5.ggpht.com/_XvrTyMj5b-k/SaH0PTc-qWI/AAAAAAAAFnM/YYo0W-gT_5I/controlvolumecylindricalcontinuity5.png Bild zu einem infinitesimalen Volumenelement in Zylinderkoordinaten http://scientificsentence.net/Electromagnetics/index.php?key=yes&Integer=Cylindrical Bild und Erläuterung zu den Einheitsvektoren im Zylinderkoordinatensystem (engl.) |

{kind=link}
{kind=link}
Literatur
- Manfred Albach, Grundlagen der Elektrotechnik 1: Erfahrungssätze, Bauelemente, Gleichstromschaltungen, 3. Auflage (Pearson Studium, 2011)