Formelsammlung Koordinatensysteme: Unterschied zwischen den Versionen
Aus GET A
| Zeile 27: | Zeile 27: | ||
\vec{\mathbf{e}}_z\times\vec{\mathbf{e}}_x &=\vec{\mathbf{e}}_y | \vec{\mathbf{e}}_z\times\vec{\mathbf{e}}_x &=\vec{\mathbf{e}}_y | ||
\end{align}</math> | \end{align}</math> | ||
| − | |style="background-color:#dde6f3;text-align:center;"| | + | |style="background-color:#dde6f3;text-align:center;"| |
<math>\begin{align} | <math>\begin{align} | ||
\vec{\mathbf{e}}_{\rho}\times\vec{\mathbf{e}}_{\varphi} &=\vec{\mathbf{e}}_z,\\ | \vec{\mathbf{e}}_{\rho}\times\vec{\mathbf{e}}_{\varphi} &=\vec{\mathbf{e}}_z,\\ | ||
| Zeile 116: | Zeile 116: | ||
|style="background-color:#c9d7ec;text-align:center;"| | |style="background-color:#c9d7ec;text-align:center;"| | ||
<math>\begin{align} | <math>\begin{align} | ||
| − | \mathrm{d | + | \mathrm{d}\vec{\mathbf{A}} &= \vec{\mathbf{e}}_z\mathrm{d}x\mathrm{d}y\\ |
&= \vec{\mathbf{e}}_y\mathrm{d}x\mathrm{d}z\\ | &= \vec{\mathbf{e}}_y\mathrm{d}x\mathrm{d}z\\ | ||
&= \vec{\mathbf{e}}_x\mathrm{d}y\mathrm{d}z | &= \vec{\mathbf{e}}_x\mathrm{d}y\mathrm{d}z | ||
| Zeile 123: | Zeile 123: | ||
<math>\begin{align} | <math>\begin{align} | ||
\mathrm{d}\vec{\mathbf{A}} &= \vec{\mathbf{e}}_z\mathrm{d}\rho\cdot \rho\mathrm{d}\varphi=\vec{\mathbf{e}}_z\rho\mathrm{d}\rho\mathrm{d}\varphi\\ | \mathrm{d}\vec{\mathbf{A}} &= \vec{\mathbf{e}}_z\mathrm{d}\rho\cdot \rho\mathrm{d}\varphi=\vec{\mathbf{e}}_z\rho\mathrm{d}\rho\mathrm{d}\varphi\\ | ||
| − | &= \vec{\mathbf{e}}_\rho\rho\mathrm{d}\varphi\cdot\mathrm{d} | + | &= \vec{\mathbf{e}}_\rho\rho\mathrm{d}\varphi\cdot\mathrm{d}z=\vec{\mathbf{e}}_\rho\rho\mathrm{d}\varphi\mathrm{d}\z |
\end{align}</math> | \end{align}</math> | ||
|style="background-color:#c9d7ec;text-align:center;"| | |style="background-color:#c9d7ec;text-align:center;"| | ||
<math>\mathrm{d}\vec{\mathbf{A}}=\vec{\mathbf{e}}_r r^2\sin\vartheta\mathrm{d}\vartheta\mathrm{d}\varphi</math> | <math>\mathrm{d}\vec{\mathbf{A}}=\vec{\mathbf{e}}_r r^2\sin\vartheta\mathrm{d}\vartheta\mathrm{d}\varphi</math> | ||
|} | |} | ||
Version vom 28. August 2012, 11:31 Uhr
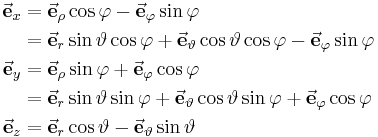
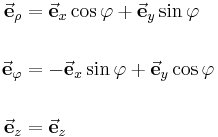
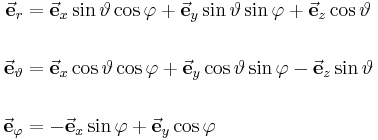
| Einheitsvektoren |
|
|
|
|
|
|
| |
|
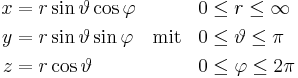
Zusammenhang mit den kartesischen Koordinaten |
|
| |
| Umrechnungen |
|
|
|
| Ortsvektor |
|
|
|
| Betrag des Ortsvektors |
|
|
|
| vektorielles Wegelement |
|
|
|
| Volumenelement |
|
|
|
| vektorielles Flächenelement |
|
Fehler beim Parsen (Unbekannte Funktion „\z“): \begin{align} \mathrm{d}\vec{\mathbf{A}} &= \vec{\mathbf{e}}_z\mathrm{d}\rho\cdot \rho\mathrm{d}\varphi=\vec{\mathbf{e}}_z\rho\mathrm{d}\rho\mathrm{d}\varphi\\ &= \vec{\mathbf{e}}_\rho\rho\mathrm{d}\varphi\cdot\mathrm{d}z=\vec{\mathbf{e}}_\rho\rho\mathrm{d}\varphi\mathrm{d}\z \end{align} |
|