Komponentendarstellung von Vektoren
| ← Zurück: Vektorprodukt | Übersicht: Vektorrechnung | Vorwärts: Formelsammlung zur Vektorrechnung → |
|
|
Zu diesem Thema stehen Aufgaben zur Selbstkontrolle zur Verfügung. |
Inhaltsverzeichnis
Komponentenzerlegung eines Vektors


Betrachtet man beispielsweise einen Vektor  im dreidimensionalen kartesischen Koordinatensystem, so lässt sich dieser auch als Summe der Produkte seiner Komponenten und den zugehörigen Einheitsvektoren, die in die Richtungen der jeweiligen Koordinatenachsen zeigen, angeben:
im dreidimensionalen kartesischen Koordinatensystem, so lässt sich dieser auch als Summe der Produkte seiner Komponenten und den zugehörigen Einheitsvektoren, die in die Richtungen der jeweiligen Koordinatenachsen zeigen, angeben:

Die Schreibweise mit den Klammern heißt Koordinatendarstellung, die andere Komponentendarstellung. Die Gültigkeit dieses Zusammenhangs lässt sich anhand des zweidimensionalen Beispiels in der Abbildung zur Vektorzerlegung nachvollziehen: Bildet man die Summe der beiden Vektoren  und
und  , so erhält man wieder den ursprünglichen Vektor . Führt man nun wie dargestellt einen Winkel
, so erhält man wieder den ursprünglichen Vektor . Führt man nun wie dargestellt einen Winkel  ein, so lässt sich feststellen, dass sich die Strecke
ein, so lässt sich feststellen, dass sich die Strecke  mit Hilfe des Kosinus wie folgt bestimmen lässt:
mit Hilfe des Kosinus wie folgt bestimmen lässt:

Mit Hilfe des Skalarprodukts (geometrisch interpretiert auch weil sich die Strecke bei der Projektion des Vektors auf die parallel zum Einheitsvektor  verlaufende Linie ergibt) lässt sich dieser Zusammenhang dann wie folgt ausdrücken:
verlaufende Linie ergibt) lässt sich dieser Zusammenhang dann wie folgt ausdrücken:

Folglich können die Komponenten eines Vektors einfach dadurch bestimmt werden, dass man das Skalarprodukt aus diesem Vektor und den jeweils zugehörigen Einheitsvektoren bildet:

Komponentendarstellung von Vektorbeziehungen
Betrachtet man nun noch mal die verschiedenen Vektorbeziehungen, so lassen sich diese in Komponentendarstellung wie folgt angeben:
Addition und Subtraktion von Vektoren

Multiplikation eines Vektors mit einem Skalar

Skalarprodukt

Bildet man das Skalarprodukt zweier gleicher Vektoren, so ergibt sich der folgende Sonderfall:

Der Betrag von lässt sich also auch dadurch bestimmen, dass man die Wurzel aus dem Skalarprodukt bildet:

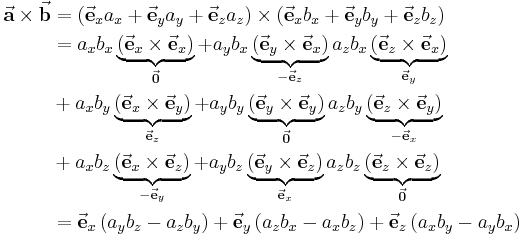
Vektorprodukt
Literatur
- Anthony Croft und Robert Davison, Mathematics for Engineers: a modern interactive approach, 3. Auflage (Pearson-Prentice Hall, 2008)
- Manfred Albach, Grundlagen der Elektrotechnik 1: Erfahrungssätze, Bauelemente, Gleichstromschaltungen, 3. Auflage (Pearson Studium, 2011)