Inverse transformation
| ← Back: Combinations of transformations | Overview: Transformations | Next: Three-Angle Representations → |
Let  be a general homogeneous transformation matrix. The inverse transformation
be a general homogeneous transformation matrix. The inverse transformation  corresponds to the transformation that reverts the rotation and translation effected by . If a vector is pre-multiplied by and subsequently pre-multiplied by , this results in the original coordinates because
corresponds to the transformation that reverts the rotation and translation effected by . If a vector is pre-multiplied by and subsequently pre-multiplied by , this results in the original coordinates because  and multiplication with the identity matrix does not change anything (see transformations).
and multiplication with the identity matrix does not change anything (see transformations).
The general homogeneous transformation matrix for three-dimensional space consists of a 3-by-3 rotation matrix  and a 3-by-1 translation vector
and a 3-by-1 translation vector  combined with the last row of the identity matrix:
combined with the last row of the identity matrix:
![\mathbf{T}=
\left[\begin{array}{ccc|c}
& & & \\
& \mathbf{R} & & \vec{\mathbf{p}}\\
& & & \\ \hline
0 & 0 & 0 & 1
\end{array}\right]](/wiki/robotics/images/math/1/3/2/1327593f05795df92e5c12f1a1a27f84.png)
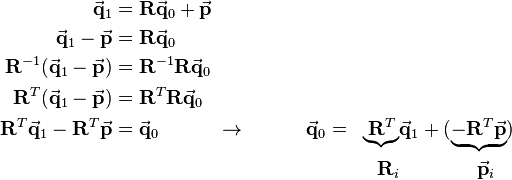
As stated in the article about homogeneous coordinates, multiplication with is equivalent in cartesian coordinates to applying the rotation matrix first and then translating the coordinates by :

The equation above is now solved for  . Here the fact is used, that the inverse of 3-by-3 rotation matrices equals the transpose of the matrix:
. Here the fact is used, that the inverse of 3-by-3 rotation matrices equals the transpose of the matrix:
Based upon this the inverse of a homogeneous transformation matrix is defined as:
![\mathbf{T}^{-1}=
\left[\begin{array}{ccc|c}
& & & \\
& \mathbf{R} & & \vec{\mathbf{p}}\\
& & & \\ \hline
0 & 0 & 0 & 1
\end{array}\right]^{-1}=
\left[\begin{array}{ccc|c}
& & & \\
& \mathbf{R}_i & & \vec{\mathbf{p}}_i\\
& & & \\ \hline
0 & 0 & 0 & 1
\end{array}\right]=
\left[\begin{array}{ccc|c}
& & & \\
& \mathbf{R}^T & & -\mathbf{R}^T\vec{\mathbf{p}}\\
& & & \\ \hline
0 & 0 & 0 & 1
\end{array}\right]](/wiki/robotics/images/math/7/f/b/7fbdbf0c44d5f9e1ed43f0f611797bf0.png)
So instead of using the Adjugate Formula or the Gauß-Jordan-Algorithm to invert a homogeneous transformation matrix, the integrated rotation matrix has just to be transposed. The transpose is then used for the rotational part of the inverse transformation matrix and its negated product with the translation vector corresponds to the translational part. The following example will give a proof for this definition.
Consider the transformation matrix Now the definition from above is used to compute the inverse transformation: In the main article about matrix inversion, exactly this inverse matrix |
 that is introduced in the script on page 3-61 and already used as example for
that is introduced in the script on page 3-61 and already used as example for ![^R\mathbf{T}_N =
\left[\begin{array}{ccc|c}
& & & \\
& \mathbf{R} & & \vec{\mathbf{p}}\\
& & & \\ \hline
0 & 0 & 0 & 1
\end{array}\right]=
\left[\begin{array}{cccc}
0 & 1 & 0 & 2a\\
0 & 0 & -1 & 0\\
-1 & 0 & 0 & 0\\
0 & 0 & 0 & 1
\end{array}\right] \quad\rightarrow\quad \mathbf{R}=\left[\begin{array}{ccc}
0 & 1 & 0 \\
0 & 0 & -1\\
-1 & 0 & 0\\
\end{array}\right], \quad \vec{\mathbf{p}}=\left[\begin{array}{c}
2a\\
0\\
0
\end{array}\right]](/wiki/robotics/images/math/c/1/7/c17d376fffc9b1880facddffe9f6e3f6.png)
![\begin{align}
\mathbf{R}^T&=
\left[\begin{array}{ccc}
0 & 0 & -1 \\
1 & 0 & 0\\
0 & -1 & 0\\
\end{array}\right] \quad\rightarrow\quad -\mathbf{R}^T\vec{\mathbf{p}}=
-\left[\begin{array}{ccc}
0 & 0 & -1 \\
1 & 0 & 0\\
0 & -1 & 0\\
\end{array}\right]
\left[\begin{array}{c}
2a\\
0\\
0
\end{array}\right]=
-\left[\begin{array}{c}
0\\
2a\\
0
\end{array}\right] =
\left[\begin{array}{c}
0\\
-2a\\
0
\end{array}\right]\\
^R\mathbf{T}_N^{-1} &=
\left[\begin{array}{ccc|c}
& & & \\
& \mathbf{R}^T & & -\mathbf{R}^T\vec{\mathbf{p}}\\
& & & \\ \hline
0 & 0 & 0 & 1
\end{array}\right]=
\left[\begin{array}{cccc}
0 & 0 & -1 & 0\\
1 & 0 & 0 & -2a\\
0 & -1 & 0 & 0\\
0 & 0 & 0 & 1
\end{array}\right]
\end{align}](/wiki/robotics/images/math/f/a/c/fac6224f0efc59a6ccd061420b096e25.png)
 has already been prooven to be the correct inverse of
has already been prooven to be the correct inverse of