Kugelkoordinaten
To-do:
- Formulierungen überarbeiten
- 2x das gleiche Bild?
- Zusammenhang zu krummlinigen orthogonalen Koordinatensystemen „auflösen“
Neu

Das Kugelkoordinatensystem ermöglicht insbesondere dann eine kompakte Beschreibung von Positionen und gerichteten Größen im Raum, wenn man es mit kugelförmigen Anordnungen zu tun hat. Das elektrische Feld einer Punktladung, die näherungsweise als kugelförmig angenommen werden kann, lässt sich zum Beispiel wesentlich einfacher in Kugel- als in kartesischen Koordinaten beschreiben (vgl. Einführung in der Übersicht zu orthogonalen Koordinatensystemen sowie Lösung vektorieller Mehrfachintegrale). Es gibt einige weitere Beispiele wie etwa die Beschreibung des elektrischen Feldes einer kugelförmigen Raumladung. Bei dem Kugelkoordinatensystem handelt es sich um ein krummliniges orthogonales Koordinatensystem.
Bei dem Kugelkoordinatensystem wird ein Punkt  im Raum durch die drei Koordinaten
im Raum durch die drei Koordinaten  ,
,  und
und  beschrieben. Dabei bezeichnet den Abstand des betrachteten Punktes vom Koordinatenursprung. Der Winkel wird wie bei den Zylinderkoordinaten gezählt, also ausgehend von der positiven
beschrieben. Dabei bezeichnet den Abstand des betrachteten Punktes vom Koordinatenursprung. Der Winkel wird wie bei den Zylinderkoordinaten gezählt, also ausgehend von der positiven  -Achse in Richtung der positiven
-Achse in Richtung der positiven  -Achse. gibt den Winkel zwischen der positiven
-Achse. gibt den Winkel zwischen der positiven  -Achse und dem vom Ursprung zum betrachteten Punkt zeigenden Ortsvektor an. Der Winkel durchläuft dabei den Wertebereich
-Achse und dem vom Ursprung zum betrachteten Punkt zeigenden Ortsvektor an. Der Winkel durchläuft dabei den Wertebereich  , so dass der positiven -Achse der Wert
, so dass der positiven -Achse der Wert  und der negativen -Achse der Wert
und der negativen -Achse der Wert  zugeordnet ist (Achtung: Fälschlicherweise wird häufig ein Wertebereich von
zugeordnet ist (Achtung: Fälschlicherweise wird häufig ein Wertebereich von  angenommen). Betrachtet man die Koordinatenfläche
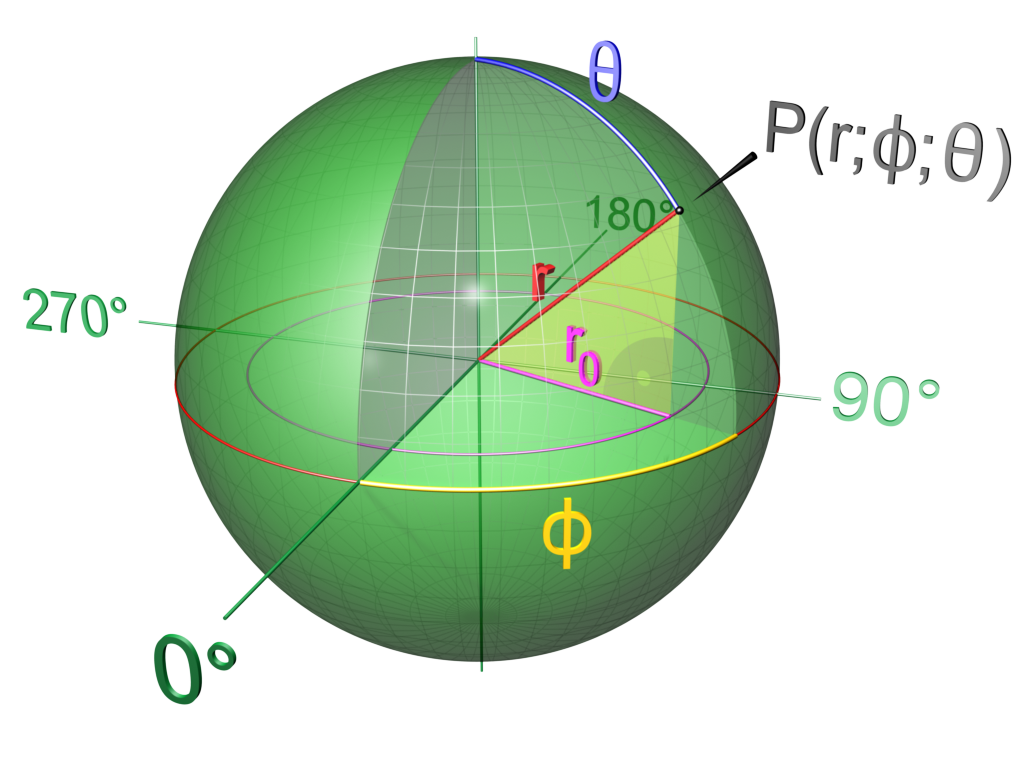
angenommen). Betrachtet man die Koordinatenfläche  , so entspricht diese einer konzentrisch um den Ursprung liegenden Kugelfläche (vgl. Abbildung). Alle Punkte mit identischem liegen dabei auf einem „Längengrad” und Punkte mit identischem liegen auf einem „Breitengrad“.
, so entspricht diese einer konzentrisch um den Ursprung liegenden Kugelfläche (vgl. Abbildung). Alle Punkte mit identischem liegen dabei auf einem „Längengrad” und Punkte mit identischem liegen auf einem „Breitengrad“.
Die Richtung der Einheitsvektoren  ,
,  und
und  hängt stets von der Position des betrachteten Punktes ab. Die nebenstehende Abbildung verdeutlicht, dass
hängt stets von der Position des betrachteten Punktes ab. Die nebenstehende Abbildung verdeutlicht, dass  und
und  immer tangential zu den Kreisbögen der -Koordinatenlinie bzw.
immer tangential zu den Kreisbögen der -Koordinatenlinie bzw.  -Koordinatenlinie im Punkt verlaufen und immer in Richtung des Ortsvektors
-Koordinatenlinie im Punkt verlaufen und immer in Richtung des Ortsvektors  zeigt.
zeigt.
Die Koordinaten und Einheitsvektoren der verschiedenen Koordinatensysteme können mit Hilfe von Transformationsgleichungen ineinander umgerechnet werden (siehe hierzu Formelsammlung Koordinatensysteme). Möchte man beispielsweise den Wert in kartesischen Koordinaten eines in Kugelkoordinaten gegebenen Punktes  ermitteln, so bietet sich die Verwendung trigonometrischer Funktionen an. Aus der Abbildung wird ersichtlich, dass hierzu zunächst die Strecke
ermitteln, so bietet sich die Verwendung trigonometrischer Funktionen an. Aus der Abbildung wird ersichtlich, dass hierzu zunächst die Strecke  in der --Ebene zu bestimmen ist:
in der --Ebene zu bestimmen ist:

Weiterhin ist ersichtlich, dass der Hypotenuse und der Ankathete in Bezug auf das durch gegebene rechtwinklige Dreieck entspricht. Damit gilt:

Setzt man nun in die untere Gleichung ein, so erhält man:

Alt
Um Modelle, wie kugelförmige Raumladungen auswerten zu können, wählt man ein Koordinatensystem, dass die Besonderheiten runder Anordnungen am besten beschreibt: das Kugelkoordinatensystem.
Kugelkoordinaten sind ähnlich wie Zylinderkoordinaten aufgebaut, nur dass sie anstelle der z-Koordinate einen weiteren Winkel besitzen, der zwischen dem Punkt  und der positiven z-Achse gemessen wird. Er kann folgende Werte annehmen:.
und der positiven z-Achse gemessen wird. Er kann folgende Werte annehmen:.
Analog zur Koordinate , die im Zylinderkoordinatensystem in der xy-Ebene den Abstand zum Ursprung angibt, gibt die Koordinate in Kugelkoordinaten den Abstand zum Ursprung an, ist dabei aber nicht auf eine Ebene beschränkt. Betrachtet man die Koordinatenfläche  , entspricht diese einer konzentrisch um den Ursprung liegenden Kugelfläche (vgl. Abbildung). Die Koordinate ist identisch mit der entsprechenden Koordinate im Zylinderkoordinatensystem.
, entspricht diese einer konzentrisch um den Ursprung liegenden Kugelfläche (vgl. Abbildung). Die Koordinate ist identisch mit der entsprechenden Koordinate im Zylinderkoordinatensystem.
Um die Transformationsgleichung aufzustellen, benutzt man die Trigonometrischen Funktionen. Soll die x-Koordinate bestimmt werden, muss zunächst der Punkt in die xy-Ebene transformiert werden. Dies geschieht, in dem man die Gegenkathete des Dreiecks zwischen der z-Achse und dem Vektor zum gesuchten Punkt berechnet (siehe Abbildung).
Um die x-Koordinate zu berechnen, bildet man den Kosinus zwischen dem Abstand zum Ursprung und der x-Achse.
Nun muss man beide Gleichungen in einander einsetzen und man erhält für x:

Analog dazu kann man auch die anderen beiden Koordinatentransformationen bestimmen, die z-Koordinate ist dabei direkt aus der Abbildung entnehmbar:
| Transformationsgleichungen | 
|

| |

|
Wie schon bei den Zylinderkoordinaten reichen die Transformationsgleichungen nicht aus, um das Koordinatensystem vollständig zu beschreiben. Dafür werden die Einheitsvektoren benötigt. Sie können über die selbe Gleichung bestimmt werden, wie die Einheitsvektoren der Zylinderkoordinaten, da diese Gleichung für alle krummlinigen orthogonalen Koordinatensysteme gelten:
Auch hier stellt diese komplizierte Form nichts weiter dar, als die Änderung des Ortsvektors nach der jeweiligen Koordinate. Außerdem muss durch den Betrag dieser Änderung geteilt werden, damit der neu entstandene Einheitsvektor die Länge 1 hat. Dabei heißt der Faktor  metrischer Faktor oder Metrikkoeffizient.
metrischer Faktor oder Metrikkoeffizient.
Die metrischen Faktoren können durch Einsetzen der Definitionsgleichungen berechnet werden:
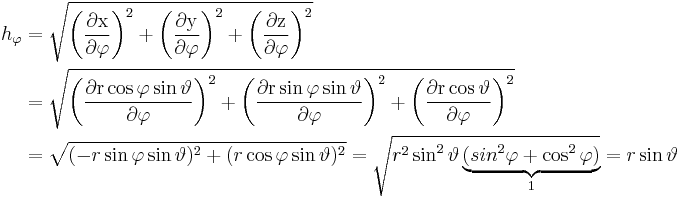
Die anderen beiden metrischen Faktoren ergeben sich äquivalent:

Anschließend können mit obiger Gleichung, die analog zum ersten Schritt der gerade gezeigten Rechnung verläuft, die Einheitsvektoren berechnet werden:
| Einheitsvektoren | 
|

| |

|
Auch bei den Kugelkoordinaten kann ein vektorielles Wegelement bestimmt werden:

Ebenso wie das Volumenelement:

Bei den Zylinderkoordinaten wurde schon gezeigt, dass sich der Ortsvektor in diesen Koordinaten übersichtlicher darstellen lässt, als in den kartesischen Koordinaten. Berechnet man den Ortsvektor in Kugelkoordinaten wird die Darstellung noch überschaubarer: Zunächst wird die allgemeine Gleichung vom Ortsvektor benutzt und die obigen Transformationsgleichungen eingesetzt: Durch hervorziehen des Faktors r und vergleich mit den Einheitsvektoren der Kugelkoordinaten erkennt man direkt den Zusammenhang für den Ortsvektor in Kugelkoordinaten: |
 in Kugelkoordinaten
in Kugelkoordinaten

Multimediale Lehrmaterialien
|
|
http://demonstrations.wolfram.com/ExploringSphericalCoordinates/ Applet: Punkt in Polarkoordinaten (engl./ free CDF-Player von Wolfram erforderlich) http://www.pha.jhu.edu/~javalab/spherical/spherical.html Applet: Punkt in Polarkoordinaten (engl.) http://demonstrations.wolfram.com/SphericalCoordinates/ Applet: Punkt in Polarkoordinaten (engl. / free CDF-Player erforderlich) |

Hilfreiche Links
|
|
http://de.academic.ru/pictures/dewiki/83/Sphere_3d.png dreidimensionales Bild zur Bestimmung eines Punktes in Kugelkoordinaten http://mathworld.wolfram.com/PolarCoordinates.html Allgemeine Einführung in die Polarkoordinaten (engl.) |

{kind=link}
| ← Zurück: Zylinderkoordinaten | Übersicht: Orthogonale Koordinatensysteme | Vorwärts: Orthogonale Koordinatensysteme:Übersicht → |