Das Linienintegral: Unterschied zwischen den Versionen
| Zeile 40: | Zeile 40: | ||
:<math>Q=\int_0^l\lambda\cdot\mathrm{d}s=\left.\lambda\cdot s\right|_0^l=\lambda\cdot l</math> | :<math>Q=\int_0^l\lambda\cdot\mathrm{d}s=\left.\lambda\cdot s\right|_0^l=\lambda\cdot l</math> | ||
| + | [[Datei:Linienladung_Gerade.svg|300px|thumb|right|Eine Linienladung, die entlang der x-Achse ausgerichtet ist.]] | ||
'''2.Fall''' | '''2.Fall''' | ||
| Zeile 55: | Zeile 56: | ||
Nun betrachtet man eine Linienladung in der Form eines Viertelkreisbogens. Es sei nun wieder anzunehmen, dass die Linienladung <math>\lambda</math> konstant ist. | Nun betrachtet man eine Linienladung in der Form eines Viertelkreisbogens. Es sei nun wieder anzunehmen, dass die Linienladung <math>\lambda</math> konstant ist. | ||
| − | Man hat nun zwei Möglichkeiten um durch Integration die Gesamtladung zu ermitteln, da so wie die Funktion in der Abbildung dargestellt ist, sie sowohl von x als auch von y abhängt. Zunächst kann man das '''Parametrisieren''' verwenden. Dabei beschreibt man x und y durch eine einzelne neue Variable. Dies ist allerdings etwas kompliziert, daher verwenden wir hier die [[Zylinderkoordinaten]] bzw. die Polarkoordinaten, um das System zu beschreiben, weil die Linienladung, dann entlang der Koordinaten verläuft, und der Viertelkreisbogen nur noch von einer Koordinate <math>\varphi</math> abhängig ist. | + | [[Datei:Linienladung_Kreisbogen.svg|300px|thumb|right|Eine Linienladung, die entlang eines Kreisbogens angeordnet ist.]] |
| + | Man hat nun zwei Möglichkeiten, um durch Integration die Gesamtladung zu ermitteln, da so wie die Funktion in der Abbildung dargestellt ist, sie sowohl von x als auch von y abhängt. Zunächst kann man das '''Parametrisieren''' verwenden. Dabei beschreibt man x und y durch eine einzelne neue Variable. Dies ist allerdings etwas kompliziert, daher verwenden wir hier die [[Zylinderkoordinaten]] bzw. die Polarkoordinaten, um das System zu beschreiben, weil die Linienladung, dann entlang der Koordinaten verläuft, und der Viertelkreisbogen nur noch von einer Koordinate <math>\varphi</math> abhängig ist. | ||
| − | Als ersten Schritt stellt man also den Viertelkreisbogen in Polarkoordinaten dar. Wir integrieren also, wie in der Abbildung zu sehen ist von der positiven x-Achse, also <math>\varphi=0</math> bis zur | + | Als ersten Schritt stellt man also den Viertelkreisbogen in Polarkoordinaten dar. Wir integrieren also, wie in der Abbildung zu sehen ist von der positiven x-Achse, also <math>\varphi=0</math> bis zur positiven y-Achse also <math>\varphi=\frac{\pi}{2}</math> Anschließend muss das [[Wegelement]] an die neuen Koordinaten angepasst werden, da nun nicht mehr nach x integriert wird, sondern nach <math>\varphi</math>. Hier ergibt es sich zu: |
:<math>\mathrm{d}x=\rho\cdot\mathrm{d}\varphi</math> | :<math>\mathrm{d}x=\rho\cdot\mathrm{d}\varphi</math> | ||
Version vom 20. April 2012, 13:11 Uhr
Die Länge einer Geraden ist, wenn Anfangs- und Endpunkt bekannt sind, einfach zu bestimmen. Schwieriger ist die Bestimmung der Länge einer gebogenen Kontur wie z.B. einer Wurfparabel. Auch in der Elektrotechnik wird das Linienintegral häufig verwendet, zum Beispiel bei der Ermittlung der elektrischen Energie oder Arbeit, die durch die Integration über dem Produkt der Spannung und der Stromstärke gebildet wird.
Um solch ein Linienintegral zu bestimmen, ist die Betrachtung über die infinitesimalen Wegelemente hilfreich:
Hier wählt man eine Funktion von z. B. zwei Veränderlichen f(x,y) entlang eines zwischen den Endpunkten  und
und  liegenden Kurvenbogens der Kontur C. Aus der Schule sollten bereits Integrale die von einer Veränderlichen zum Beispiel
liegenden Kurvenbogens der Kontur C. Aus der Schule sollten bereits Integrale die von einer Veränderlichen zum Beispiel  abhängig sind bekannt sein. Allerdings können Integrale genausogut von zwei oder mehr Veränderlichen abhängen, solche Dinge ergeben sich jedoch meistens aus den konkreten Aufgabenstellungen. Für diese Betrachtung wird der Kurvenbogen C in n Teilstücke
abhängig sind bekannt sein. Allerdings können Integrale genausogut von zwei oder mehr Veränderlichen abhängen, solche Dinge ergeben sich jedoch meistens aus den konkreten Aufgabenstellungen. Für diese Betrachtung wird der Kurvenbogen C in n Teilstücke  mit i = 1 ... n zerlegt und auf jedem Teilstück wird ein Punkt
mit i = 1 ... n zerlegt und auf jedem Teilstück wird ein Punkt  mit den Koordinaten
mit den Koordinaten  bestimmt.
bestimmt.

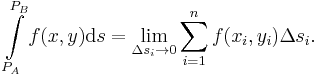
Damit man einen Näherungswert für das Linienintegral bekommt, bildet man zunächst das Produkt aus den Bogenlängen und den Funktionswerten  an den Punkten . Danach werden diese Produkte aufsummiert und man erhält so die Näherung:
an den Punkten . Danach werden diese Produkte aufsummiert und man erhält so die Näherung:
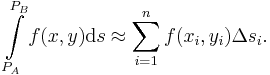
Da nicht nur nach einer ungefähren Approximation gefragt ist, sondern nach einer möglichst genauen Darstellung, bildet man den Grenzwert dieser Summe und lässt die Anzahl der Teilstücke n gegen Unendlich gehen, während die Ausdehnung der Bogenlängen gegen Null geht. Auf diese Weise erhält man eine sehr feine Unterteilung der Kontur C und die Summe geht gegen ihren Grenzwert (sofern er existiert und von der Wahl der Bogenlängen und den Punkten unabhängig ist). So ergibt sich das Linienintegral der Kontur C zwischen den Punkten und :
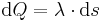
In diesem Beispiel wird eine Linienladung Linienladungen sind Ladungen entlang einer Kontur deren Wert pro Streckenabschnitt schwanken kann. In mathematischer Form wird sie durch die differentielle Ableitung der Ladung nach dem Streckenelement ausgedrückt: Die Einheit der Linienladung ist und anschließend integriert werden. Dadurch erhält man das Linienintegral, welches wir in den folgenden Fällen anwenden wollen:
Im einfachsten Fall ist die Linienladung Dadurch wird das Integral einfach, da 2.Fall Etwas schwieriger wird es, wenn Dadurch muss die Funktion über die Länge der Linienladung integriert werden, um den Wert der Gesamtladung zu ermitteln. Formal wird dabei einfach die Funktion 3.Fall
Nun betrachtet man eine Linienladung in der Form eines Viertelkreisbogens. Es sei nun wieder anzunehmen, dass die Linienladung Man hat nun zwei Möglichkeiten, um durch Integration die Gesamtladung zu ermitteln, da so wie die Funktion in der Abbildung dargestellt ist, sie sowohl von x als auch von y abhängt. Zunächst kann man das Parametrisieren verwenden. Dabei beschreibt man x und y durch eine einzelne neue Variable. Dies ist allerdings etwas kompliziert, daher verwenden wir hier die Zylinderkoordinaten bzw. die Polarkoordinaten, um das System zu beschreiben, weil die Linienladung, dann entlang der Koordinaten verläuft, und der Viertelkreisbogen nur noch von einer Koordinate Als ersten Schritt stellt man also den Viertelkreisbogen in Polarkoordinaten dar. Wir integrieren also, wie in der Abbildung zu sehen ist von der positiven x-Achse, also Diese Umformung ist ebenso für die Einheit wichtig, die Ladung hat die Einheit Mit diesen Vorbetrachten lässt sich folgendes Integral aufstellen: |
 betrachtet, die im folgenden mehrere Verläufe annimmt.
betrachtet, die im folgenden mehrere Verläufe annimmt.

![[\lambda]=\frac{\mathbf{As}}{\mathbf{m}}](/wiki/geta/images/math/8/b/8/8b834d0122f8869c16e141a10e987d12.png) .
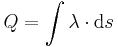
Möchte man aus der Linienladung die Gesamtladung bestimmen, muss zunächst nach der Ladung umgestellt werdern:
.
Möchte man aus der Linienladung die Gesamtladung bestimmen, muss zunächst nach der Ladung umgestellt werdern:





 abhängig ist.
abhängig ist.
 bis zur positiven y-Achse also
bis zur positiven y-Achse also  Anschließend muss das
Anschließend muss das 
 , weil die Linienladung
, weil die Linienladung  besitzt, muss die integrierte Größe die Einheit
besitzt, muss die integrierte Größe die Einheit  besitzen, damit die Gleichung stimmt. An vielen Stellen werden Winkel wie
besitzen, damit die Gleichung stimmt. An vielen Stellen werden Winkel wie  :
:


Das Linienintegral einer vektoriellen Größe
Im vorherigen ging es um die Integration skalarer Größen, hat man aber beispielsweise ein elektrisches Feld  angelegt, betrachtet man nicht nur die Stärke sondern auch die Richtung des Feldes im Raum. Um das hinreichend berücksichtigen zu können muss die obige Form des Linienintegrals angepasst werden. Deswegen hat man sowohl bei der Funktion
angelegt, betrachtet man nicht nur die Stärke sondern auch die Richtung des Feldes im Raum. Um das hinreichend berücksichtigen zu können muss die obige Form des Linienintegrals angepasst werden. Deswegen hat man sowohl bei der Funktion  als auch bei dem Wegelement
als auch bei dem Wegelement  eine vektorielle Größe, da es in diesem Beispiel letzlich den Unterschied zwischen einer positiven, negativen oder gar keiner Spannung macht, wie man im folgenden erkennen kann. =
eine vektorielle Größe, da es in diesem Beispiel letzlich den Unterschied zwischen einer positiven, negativen oder gar keiner Spannung macht, wie man im folgenden erkennen kann. =

Zur Bestimmung des Linienintegrals einer vektoriellen Größe kann ebenso wie bei skalaren Größen das Integral über die infinitesimalen Wegelemente berechnet werden. Man verwendet nun wieder eine Kontur C, die zwischen den Punkten und verläuft. Allerdings sind diesmal, wie schon erwähnt, die Wegelemente  gerichtete Größen. Auch hier wird die Kontur in n Teilstücke mit i = 1 ... n unterteilt und wie oben ein Punkt mit den Koordinaten
gerichtete Größen. Auch hier wird die Kontur in n Teilstücke mit i = 1 ... n unterteilt und wie oben ein Punkt mit den Koordinaten  und einer vektorielle Größe
und einer vektorielle Größe  zugeordnet.
Um nun das Linienintegral berechnen zu können muss das Skalarprodukt zwischen jedem Wegelement, dem dazugehörigen Funktionswert und dem eingeschlossenem Winkel
zugeordnet.
Um nun das Linienintegral berechnen zu können muss das Skalarprodukt zwischen jedem Wegelement, dem dazugehörigen Funktionswert und dem eingeschlossenem Winkel  gebildet werden.
gebildet werden.

Summiert man nun ebenfalls alle Skalarprodukte auf und bildet gemäß der Gleichung des Linienintegrals der skalaren Größen den Grenzwert, erhält man für das Linienintegral einer vektoriellen Größe folgende Form:

Ein häufiger Anwendungsfall des Linienintegrals ergibt sich bei der Bestimmung der Spannung im elektrischen Feld.
Bildet man beispielsweise eine Kontur gemäß der Abbildung in einem homogenen gleichgerichtetem elektrischen Feld erhält man folgendes Ringintegral:
Um dieses Integral zu lösen, können wir vier Fälle unterscheiden: Nun unterteilt man das Integral in diese vier Bereiche und bildet jeweils das Skalarprodukt: Daraus folgt: Durch die eingeschlossenen Rechten Winkel in den letzen beiden Fällen ergibt das Skalarprodukt Null und es bleibt nur noch übrig: Da hier die Strecken zwischen Dies ist eine wichtige Erkenntnis im elektrostatischen Feld: Das Ringintegral über ein homogenes, elektrisches Feld ergibt immer Null. |

 bis
bis  , die mit dem Elektrischen Feld verläuft.
, die mit dem Elektrischen Feld verläuft. bis
bis  , die entgegen dem Elektrischen Feld verläuft.
, die entgegen dem Elektrischen Feld verläuft.



Gesucht ist die Arbeit
die an einer Kugel verichtet wird, welche infolge einer Kraft Der Bewegungsvorgang wird im zylindrische Koordinatensystem mit dem Ursprung im Mittelpunkt des Kreises beschrieben, dadurch bewegt sich die Kugel in Richtung wachsender Um die geleistete Arbeit W zu bestimmen, muss die Kraft in Komponenten zerlegt werden, da nur die in Richtung der Bewegung wirkende Kraftkomponente einen Beitrag zur Arbeit leistet. Eine Komponente wirkt in Richtung |
 ,
, eine Laufrinne hinunterrollt. Die Laufrinne ist halbkreisförmige und spannt sich vom Anfangspunkt
eine Laufrinne hinunterrollt. Die Laufrinne ist halbkreisförmige und spannt sich vom Anfangspunkt 
 . So ist auf dem Halbkreis der Winkel
. So ist auf dem Halbkreis der Winkel  zwischen der Bewegungsrichtung
zwischen der Bewegungsrichtung  und der Kraftrichtung
und der Kraftrichtung  bekannt, da die vorgegebene Kraft sich am einfachsten mit einer kartesischen Komponente
bekannt, da die vorgegebene Kraft sich am einfachsten mit einer kartesischen Komponente  beschreiben lässt.
beschreiben lässt.
 .
Nun benötigt man das Skalarprodukt aus der vektoriellen Kraft und dem gerichteten Wegelement, dessen Integration vom Anfangspunkt
.
Nun benötigt man das Skalarprodukt aus der vektoriellen Kraft und dem gerichteten Wegelement, dessen Integration vom Anfangspunkt 
Multimediale Lehrmaterialien
|
|
http://mathdl.maa.org/images/upload_library/4/vol4/kaskosz/antapp.html Applet: verschiedener Kurvenbeispiele und ihre Integrale (engl.) http://www.dangries.com/Flash/IntegralSketch/IntegralSketch.html Applet zum Verständnis von Integralen http://www.uni-due.de/~matj00/bauws10/VorlBau100518.html Applet zum Verständnis von Integralen |

Hilfreiche Links
|
|
http://www.geogebra.org/de/upload/files/dynamische_arbeitsblaetter/lwolf/integralfkt/integralfkt1.html Interaktives Arbeitsblatt zur Integration http://web.mit.edu/8.02t/www/materials/modules/ReviewB.pdf Bebilderte Erklärung zu Kartesischen-, Kugel-, und Zylinderkoordinatensystemen und deren infinitesimalen Elementen (engl.) |

Literatur
- Manfred Albach, Grundlagen der Elektrotechnik 1: Erfahrungssätze, Bauelemente, Gleichstromschaltungen, 3. Auflage (Pearson Studium, 2011)
- Kurt Meyberg and Peter Vachenauer, Höhere Mathematik 1: Differential- und Integralrechnung. Vektor- und Matrizenrechnung, 6. Auflage (Springer Berlin Heidelberg, 2001)
- Wolfgang Pavel and Ralf Winkler, Mathematik für Naturwissenschaftler, 1. Auflage (Pearson Studium, 2007)
- Dr. Hempel, "Mathematische Grundlagen", Linienintegral, Universität Magdeburg
- TU Freiberg, "Parameter- und Kurvenintegrale", Script, 2010
| ← Zurück: Erweiterung der Integralrechnung:Übersicht | Übersicht: Erweiterung der Integralrechnung | Vorwärts: Das Flächenintegral → |