Rotations using quaternions
| ← Back: Multiplication of quaternions | Overview: Quaternions | Next: Realization of transformations → |

Usually rotations are defined by 3 angles, either Euler or Roll-Pitch-Yaw angles. So three successive rotations around three different axes lead to a combined rotation, that can be described by a single rotation matrix. Such a combined rotation is equal to a rotation around a certain axis in three-dimensional space about a certain angle. This is shown in the figure on the right. The vector  is rotated such that it results in
is rotated such that it results in  . This could be done by rotating the vector around the z-, the y- and the x-axis successively or by just rotating it around the rotation axis
. This could be done by rotating the vector around the z-, the y- and the x-axis successively or by just rotating it around the rotation axis  by
by  .
.
Mathematical description
First the rotation axis has to be defined by a unit vector. So it holds:

Then a rotation about by the angle can be represented by a quaternion  like follows:
like follows:
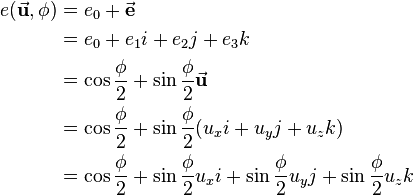
So the scalar part  is defined as the cosine of
is defined as the cosine of  and the vector part consisting of
and the vector part consisting of  ,
,  and
and  equals multiplied by the sine of .
equals multiplied by the sine of .
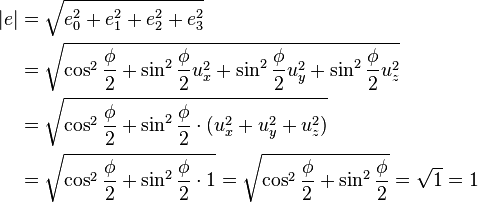
That the resulting quaternion is a unit quaternion can be proven as follows:
So if a quaternion  is given, the angle and the rotation axis can be computed as follows:
is given, the angle and the rotation axis can be computed as follows:
![\begin{align}
\phi &= 2\cdot \arccos e_0 \\
\vec{\mathbf{u}} &= \frac{1}{\sin{\frac{\phi}{2}}}\left[\begin{array}{c}e_1\\e_2\\e_3\end{array}\right]
\end{align}](/wiki/robotics/images/math/1/e/7/1e72499fe5dbe6181daca882d56bad8b.png)
Mathematical solving of a rotation using a quaternion
Applet
The following three-dimensional applet helps you to understand the relation between Roll-Pitch-Yaw angles and a quaternion. The initial position of the object can be set using the sliders for x, y and z. Then the object can be rotated by defining the roll, pitch and yaw angles. The most intuitive way is to start with the yaw angle, because this one is applied first. Then the object is rotated aroud the y-axis by the pitch angle followed by a rotation around the x-axis by the roll angle. The quaternion describing the same rotation is shown dynamically and the corresponding angle  and the rotation axis are presented. The rotation axis and the rotational path are visualized on the left side. After pressing the Show Quaternion Rotation button, the rotation of the object around gets animated.
and the rotation axis are presented. The rotation axis and the rotational path are visualized on the left side. After pressing the Show Quaternion Rotation button, the rotation of the object around gets animated.