Realization of transformations
| ← Back: Composition of rotations | Overview: Quaternions | Next: ??? → |
Quaternion notation for general transformations
Up to now transformations have been defined by homogeneous matrices combining a rotation matrix  and a translation vector
and a translation vector  . Now a new notation is introduced to represent a transformation using two quaternions
. Now a new notation is introduced to represent a transformation using two quaternions  and
and  :
:
![\mathbf{T} = \left[\begin{array}{cccc} & & & \\ & \mathbf{R} & & \vec{\mathbf{p}} \\ & & & \\ 0 & 0 & 0 & 1\end{array}\right] \quad \equiv \quad \left\{e,p\right\}](/wiki/robotics/images/math/6/6/1/661d04cca4174d58de7984920f826fb3.png)
The quaternion is equivalent to and describes the rotation while is defined as  and so equivalent to the translation.
and so equivalent to the translation.

Applying such a transformation to a quaternion  is done by first rotating with corresponding to the rotation equation and then adding :
is done by first rotating with corresponding to the rotation equation and then adding :

Combination of transformations
It is known that a combination of transformations is defined as:
![\begin{align}
\mathbf{T}_c = \mathbf{T}_2\mathbf{T}_1 =
\left[\begin{array}{cccc} & & & \\ & \mathbf{R}_2\mathbf{R}_1 & & \vec{\mathbf{p}}_2+\mathbf{R}_2\vec{\mathbf{p}}_1 \\ & & & \\ 0 & 0 & 0 & 1\end{array}\right]
=
\left[\begin{array}{cccc} & & & \\ & \mathbf{R}_c & & \vec{\mathbf{p}}_c \\ & & & \\ 0 & 0 & 0 & 1\end{array}\right]
\quad \equiv \quad
\left\{e_c,p_c\right\}=\left\{e_2,p_2\right\}\left\{e_1,p_1\right\}
\end{align}](/wiki/robotics/images/math/8/b/c/8bc75145f54c5ab026e992e40f2a1842.png)
But how can the two quaternions  and
and  of the quaternion notation be calculated based on the quaternions of individual transformations? The first transformation leads to
of the quaternion notation be calculated based on the quaternions of individual transformations? The first transformation leads to

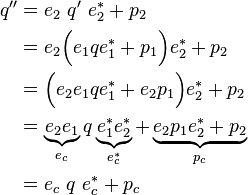
Now the second transformation is applied on  . The resulting equation can be solved using the distributive law for quaternions to determine and :
. The resulting equation can be solved using the distributive law for quaternions to determine and :