Difference between revisions of "Cross product"
| Line 1: | Line 1: | ||
{{Navigation|before=[[Dot product]]|overview=[[Vector algebra]]|next=[[Matrices]]}} | {{Navigation|before=[[Dot product]]|overview=[[Vector algebra]]|next=[[Matrices]]}} | ||
{{Exercise|Vector_algebra/Selftest}} | {{Exercise|Vector_algebra/Selftest}} | ||
| + | |||
[[File:vectoralgebra_crossproduct.jpg|right|350px]] | [[File:vectoralgebra_crossproduct.jpg|right|350px]] | ||
Revision as of 13:53, 23 May 2014
| ← Back: Dot product | Overview: Vector algebra | Next: Matrices → |
|
|
There are exercises as selftest for this article. |

The cross product of two vectors is denoted with an  . The cross product of vector
. The cross product of vector  and vector
and vector  results in a new vector
results in a new vector

that is perpendicular to the surface spanned by vectors and (see figure). Furthermore the three vectors , and  build a rectangular coordinate system based on the right-hand rule. The magnitude of vector equals the area of the parallelogram spanned by and and is calculated as follows:
build a rectangular coordinate system based on the right-hand rule. The magnitude of vector equals the area of the parallelogram spanned by and and is calculated as follows:

In this equation  denotes the angle between the two vectors which ranges from
denotes the angle between the two vectors which ranges from  to
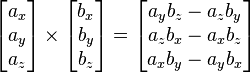
to  (see figure above). Furthermore it should be noted that the cross product is exclusively defined for the three-dimensional euclidian vector space. Therefore the following computational relationship holds:
(see figure above). Furthermore it should be noted that the cross product is exclusively defined for the three-dimensional euclidian vector space. Therefore the following computational relationship holds:
Based on the described relationships it can be seen, that the commutative law does not hold for the cross product. Instead, the following holds:

Furthermore there are some special cases that lead to simplifications in technical context:

Multimedial educational material
|
|
http://www.surendranath.org/Applets/Math/VectorProduct/VP.html Applet: Cross product of two vectors in cartesian and polar coordinates http://demonstrations.wolfram.com/CrossProductOfVectorsInTheYZPlane/ Applet: Cross product of two vectors in the yz-plane |

Literatur
- Manfred Albach, Grundlagen der Elektrotechnik 1: Erfahrungssätze, Bauelemente, Gleichstromschaltungen, 3. Edition (Pearson Studium, 2011)
- Kurt Meyberg und Peter Vachenauer, Höhere Mathematik 1: Differential- und Integralrechnung. Vektor- und Matrizenrechnung, 6. Edition (Springer Berlin Heidelberg, 2001)
- Wolfgang Pavel und Ralf Winkler, Mathematik für Naturwissenschaftler, 1. Edition (Pearson Studium, 2007)