Difference between revisions of "Determinant of a matrix"
(→4-by-4 matrices) |
(→4-by-4 matrices) |
||
| Line 81: | Line 81: | ||
|Title=determinant of a 4-by-4 matrix | |Title=determinant of a 4-by-4 matrix | ||
|Contents= | |Contents= | ||
| − | This example describes the computation of the determinant of the transformation matrix <math>^ | + | This example describes the computation of the determinant of the transformation matrix <math>^R\mathbf{T}_N</math> that is introduced in the robotics script in chapter 3 on page 3-37 and used on the following pages. |
| − | <br/><math> | + | <br/><br/> |
| − | \mathbf{ | + | :<math> |
| + | ^R\mathbf{T}_N = | ||
\left[\begin{array}{cccc} | \left[\begin{array}{cccc} | ||
| − | 1 | + | 0 & 1 & 0 & 2a\\ |
| − | + | 0 & 0 & -1 & 0\\ | |
| − | 0 | + | -1 & 0 & 0 & 0\\ |
| − | 0 & 0 & | + | 0 & 0 & 0 & 1 |
\end{array}\right]</math><br/><br/> | \end{array}\right]</math><br/><br/> | ||
| − | For matrix <math>\mathbf{ | + | For matrix <math>^R\mathbf{T}_N</math> it is useful to choose row 4 because it contains three zero values as factors:<br/><br/> |
<math>\begin{align} | <math>\begin{align} | ||
| − | \det(\mathbf{ | + | \det(^R\mathbf{T}_N)&= |
\left|\begin{array}{cccc} | \left|\begin{array}{cccc} | ||
1 & 2 & 0 & 0\\ | 1 & 2 & 0 & 0\\ | ||
Revision as of 11:30, 22 May 2014
| ← Back: Minors and cofactors | Overview: Matrices | Next: Matrix inversion → |
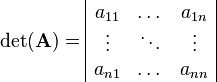
The determinant can be computed for an n-by-n square matrix. In the context of matrices the determinant of a matrix is a special function that assigns a scalar value to the matrix. It is denoted with  or in matrix structure with vertical lines:
or in matrix structure with vertical lines:
Considering a matrix as a linear system the determinant provides information about its solvability. If the determinant is nonzero the linear system is clearly solvable. This feature is also important for matrix inversion.
2-by-2 matrices
For a 2-by-2 matrix the determinant can easily computed as follows:

|
![\det
\left[\begin{array}{cc}
1 & 3\\
2 & 2
\end{array}\right] =
\left|\begin{array}{cc}
1 & 3\\
2 & 2
\end{array}\right|=
1\cdot 2-3\cdot 2=
2-6=-4](/wiki/robotics/images/math/f/a/e/faea73a114f85c32eb6c31664358eadc.png)
3-by-3 matrices
For 3-by-3 matrices there is a formula called Rule of Sarrus to compute the determinant. The first two columns of the matrix are noted anew on the right of matrix. Then you can form six diagonals that describe the arithmetic operations to be performed:

The sum of the diagonal elements then forms the determinant:

The Khan Academy[1] provides a good video [2] where this formula is explained. Please watch the video for further information about the computation of the determinant of a 3-by-3 matrix.
4-by-4 matrices
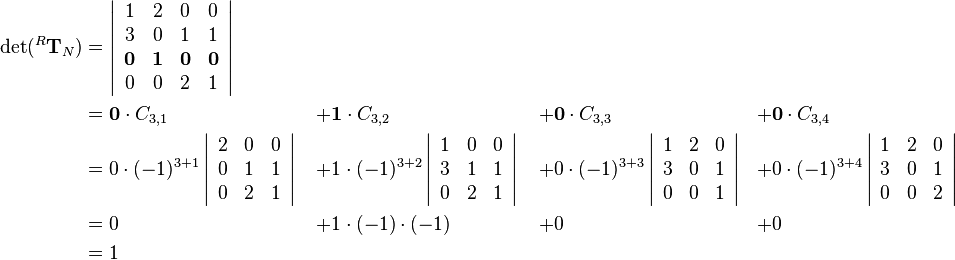
One possibility to compute the determinant of a 4-by-4 matrix is a formula that uses the minors and cofactors of a matrix. First one row or column has to be choosen. The sum of the four corresponding values of the row or column multiplied by the related cofactors results in the determinant. If a column  is choosen, it holds:
is choosen, it holds:

And if a row  is choosen:
is choosen:

This example describes the computation of the determinant of the transformation matrix For matrix |
 that is introduced in the robotics script in chapter 3 on page 3-37 and used on the following pages.
that is introduced in the robotics script in chapter 3 on page 3-37 and used on the following pages.
![^R\mathbf{T}_N =
\left[\begin{array}{cccc}
0 & 1 & 0 & 2a\\
0 & 0 & -1 & 0\\
-1 & 0 & 0 & 0\\
0 & 0 & 0 & 1
\end{array}\right]](/wiki/robotics/images/math/8/5/e/85e5abe5247392c6a2634922b8382d3d.png)
References
- ↑ https://www.khanacademy.org/ Khan Academy
- ↑ https://www.khanacademy.org/.../finding-the-determinant-of-a-3x3-matrix-method-1 Determinant of a 3-by-3 matrix