Difference between revisions of "Pure and unit quaternions"
From Robotics
| Line 4: | Line 4: | ||
A quaternion whose vector part is zero equals a real number corresponding to the scalar part. | A quaternion whose vector part is zero equals a real number corresponding to the scalar part. | ||
| − | A quaternion whose scalar part | + | A quaternion whose scalar part is zero, is called a '''pure quaternion'''. The square of pure quaternions is always real and not positive. |
| + | |||
| + | Multiplication of pure quaternions leads to | ||
:<math> | :<math> | ||
| − | + | (0,\vec{x})(0,\vec{y})=(-\vec{x}\cdot\vec{y},\vec{x}\cross\vec{y}) | |
</math> | </math> | ||
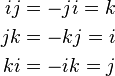
Unlike the multiplication of real or complex numbers, the multiplication is not commutative: | Unlike the multiplication of real or complex numbers, the multiplication is not commutative: | ||
Revision as of 15:28, 23 June 2015
| ← Back: Basic properties of quaternions | Overview: Quaternions | Next: Addition of quaternions → |
Pure quaternion
A quaternion whose vector part is zero equals a real number corresponding to the scalar part.
A quaternion whose scalar part is zero, is called a pure quaternion. The square of pure quaternions is always real and not positive.
Multiplication of pure quaternions leads to
- Failed to parse (unknown function "\cross"): (0,\vec{x})(0,\vec{y})=(-\vec{x}\cdot\vec{y},\vec{x}\cross\vec{y})
Unlike the multiplication of real or complex numbers, the multiplication is not commutative: