Difference between revisions of "Pure and unit quaternions"
From Robotics
| Line 1: | Line 1: | ||
| − | {{Navigation|before=[[ | + | {{Navigation|before=[[Basic properties of a quaternion]]|overview=[[Quaternions]]|next=[[Rotations using quaternions]]}} |
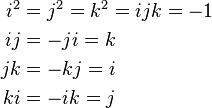
For these imaginary units, the following rules hold: | For these imaginary units, the following rules hold: | ||
Revision as of 15:45, 28 May 2015
| ← Back: Basic properties of a quaternion | Overview: Quaternions | Next: Rotations using quaternions → |
For these imaginary units, the following rules hold: