Zylinderkoordinaten: Unterschied zwischen den Versionen
| Zeile 1: | Zeile 1: | ||
| + | Um Zylinderkoordinaten zu verstehen, hilft es sich einen Zylinder vorzustellen und ihn in seine Bestandteile, also Deckel und Mantelflächen zu unterteilen. Die Deckelfläche lässt sich dabei am einfachsten mit ihren Radius <math>\rho</math> und dem Winkel <math>\varphi</math> beschreiben. | ||
| + | |||
| + | Um auch noch die Höhe berücksichtigen zu können wählt man die z-Koordinate, die schon aus den kartesichen Koordinaten bekannt ist. Diese entspricht der Länge der Matelfläche des Zylinders. Mit diesen drei Koordinaten lässt sich jeder Raumpunkt erfassen. | ||
| + | |||
| + | Die Definitionsgleichungen <xr id="eqn:definition"/> für die Koordinaten des Kreiszylinders <math>\left( \mathrm{u}_1 = \rho, \mathrm{u}_2 = \varphi, \mathrm{u}_3 = \mathrm{z} \right)</math> können unmittelbar der unteren Abbildung entnommen werden: | ||
| + | |||
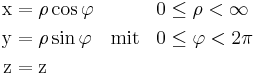
Beim Übergang von kartesischen Koordinaten zu Zylinderkoordinaten bleibt die z-Koordinate unverändert, während die Position eines Punktes <math>\mathrm{P}(\mathrm{x},\mathrm{y})</math> in einer Ebene z = const. jetzt durch die beiden in <xr id="fig:krummlinige_koordinaten3"/> eingetragenen Koordinaten <math>\rho</math> und <math>\varphi</math> beschrieben wird. Die Koordinate <math>\rho</math> kennzeichnet den Abstand des Punktes von der z-Achse, der Winkel <math>\varphi</math> wird definitionsgemäß beginnend bei der positiven x-Achse entgegen dem Uhrzeigersinn gezählt. Der positiven x-Achse ist der Wert <math>\varphi = 0</math> zugeordnet, der negativen x-Achse der Wert <math>\varphi = \pi</math>. Die Definitionsgleichungen <xr id="eqn:definition"/> für die Koordinaten des Kreiszylinders <math>\left( \mathrm{u}_1 = \rho, \mathrm{u}_2 = \varphi, \mathrm{u}_3 = \mathrm{z} \right)</math> können unmittelbar der unteren Abbildung entnommen werden: | Beim Übergang von kartesischen Koordinaten zu Zylinderkoordinaten bleibt die z-Koordinate unverändert, während die Position eines Punktes <math>\mathrm{P}(\mathrm{x},\mathrm{y})</math> in einer Ebene z = const. jetzt durch die beiden in <xr id="fig:krummlinige_koordinaten3"/> eingetragenen Koordinaten <math>\rho</math> und <math>\varphi</math> beschrieben wird. Die Koordinate <math>\rho</math> kennzeichnet den Abstand des Punktes von der z-Achse, der Winkel <math>\varphi</math> wird definitionsgemäß beginnend bei der positiven x-Achse entgegen dem Uhrzeigersinn gezählt. Der positiven x-Achse ist der Wert <math>\varphi = 0</math> zugeordnet, der negativen x-Achse der Wert <math>\varphi = \pi</math>. Die Definitionsgleichungen <xr id="eqn:definition"/> für die Koordinaten des Kreiszylinders <math>\left( \mathrm{u}_1 = \rho, \mathrm{u}_2 = \varphi, \mathrm{u}_3 = \mathrm{z} \right)</math> können unmittelbar der unteren Abbildung entnommen werden: | ||
:<equation id="eqn:definition2"> | :<equation id="eqn:definition2"> | ||
Version vom 3. April 2012, 13:51 Uhr
Um Zylinderkoordinaten zu verstehen, hilft es sich einen Zylinder vorzustellen und ihn in seine Bestandteile, also Deckel und Mantelflächen zu unterteilen. Die Deckelfläche lässt sich dabei am einfachsten mit ihren Radius  und dem Winkel
und dem Winkel  beschreiben.
beschreiben.
Um auch noch die Höhe berücksichtigen zu können wählt man die z-Koordinate, die schon aus den kartesichen Koordinaten bekannt ist. Diese entspricht der Länge der Matelfläche des Zylinders. Mit diesen drei Koordinaten lässt sich jeder Raumpunkt erfassen.
Die Definitionsgleichungen ??? für die Koordinaten des Kreiszylinders  können unmittelbar der unteren Abbildung entnommen werden:
können unmittelbar der unteren Abbildung entnommen werden:
Beim Übergang von kartesischen Koordinaten zu Zylinderkoordinaten bleibt die z-Koordinate unverändert, während die Position eines Punktes  in einer Ebene z = const. jetzt durch die beiden in Abbildung 1 eingetragenen Koordinaten und beschrieben wird. Die Koordinate kennzeichnet den Abstand des Punktes von der z-Achse, der Winkel wird definitionsgemäß beginnend bei der positiven x-Achse entgegen dem Uhrzeigersinn gezählt. Der positiven x-Achse ist der Wert
in einer Ebene z = const. jetzt durch die beiden in Abbildung 1 eingetragenen Koordinaten und beschrieben wird. Die Koordinate kennzeichnet den Abstand des Punktes von der z-Achse, der Winkel wird definitionsgemäß beginnend bei der positiven x-Achse entgegen dem Uhrzeigersinn gezählt. Der positiven x-Achse ist der Wert  zugeordnet, der negativen x-Achse der Wert
zugeordnet, der negativen x-Achse der Wert  . Die Definitionsgleichungen ??? für die Koordinaten des Kreiszylinders können unmittelbar der unteren Abbildung entnommen werden:
. Die Definitionsgleichungen ??? für die Koordinaten des Kreiszylinders können unmittelbar der unteren Abbildung entnommen werden:
Formel (1)

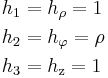
Die metrischen Faktoren können durch Einsetzen der Definitionsgleichungen Formel (1) in die ??? berechnet werden:
Formel (2)
Für das vektorielle Wegelement folgt unmittelbar mit ???:

Für das Volumenelement folgt mit ???:

Mit dem Ortsvektor (???)

Formel (3)
und den metrischen Faktoren (Formel (2)) werden aus ??? die Einheitsvektoren bestimmt:
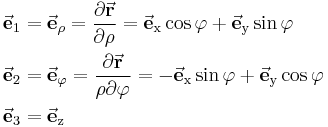
Formel (4)
Ein Vergleich der Beziehungen Formel (3) und Formel (4) zeigt, dass der Ortsvektor in Zylinderkoordinaten die nachstehende Form annimmt:

Gegeben sei der Ortsvektor Nun soll man diesen Vektor in zylindrischen Koordinaten ausdrücken: |
 in kartesischen Koordinaten.
in kartesischen Koordinaten.

Multimediale Lehrmaterialien
|
|
http://demonstrations.wolfram.com/ExploringCylindricalCoordinates/ Applet: Punkt in Zylinderkoordinaten (engl./ free CDF-Player erforderlich) http://demonstrations.wolfram.com/CylindricalCoordinates/ Applet: Punkt in Zylinderkoordinaten (engl./ free CDF-Player erforderlich) http://www.pha.jhu.edu/~javalab/cylindrical/cylindrical.html Applet: Punkt in Zylinderkoordinaten (engl.) |

Hilfreiche Links
|
|
http://scientificsentence.net/Electromagnetics/index.php?key=yes&Integer=Cylindrical Bild und Erläuterung zu den Einheitsvektoren im Zylinderkoordinatensystem (engl.) http://www.math.wpi.edu/Course_Materials/MA2251C99/images/cylndrcl.gif Bild zu infinitesimalen Volumenelement in Zylinderkoordinatensystem http://lh5.ggpht.com/_XvrTyMj5b-k/SaH0PTc-qWI/AAAAAAAAFnM/YYo0W-gT_5I/controlvolumecylindricalcontinuity5.png Bild zu einem infinitesimalen Volumenelement in Zylinderkoordinaten |

{kind=link}
{kind=link}
| ← Zurück: Krummlinige orthogonale Koordinatensysteme | Übersicht: Orthogonale Koordinatensysteme | Vorwärts: Kugelkoordinaten → |