Visual Monocular Odometry and SLAM
|
Summary
Localization of mobile vehicles is an essential problem in the field of autonomous robots and intelligent vehicles. As the global localization based on the GPS is not accurate, SLAM methods, in which the poseof the vehicle is calculated based on the fusion of data from different sensors are an unavoidable part of the vehicles and mobile robots. The SLAM problem has intensively been investigated in the last two decades. The methods based on the laser scanner sensors have become mature enough and can be deployed for indoor and outdoor scenarios safely. However, the laser scanner sensors are typically expensive and in case of the 6-DOF SLAM purposes, processing of the point clouds from laser scanners are challenging and time consuming. Visual odometry and SLAM methods, on the other hand, rely on camera data, which are much cheaper than laser scanners. In our Lab, we focus on especial type of visual odometry and SLAM in which only one single camera is utilized. These methods are known as monocular odometry or SLAM. Monocular methods are complex as a single camera can only provide bearing measurements. Hence, the depths of scenes are not measurable but they should be estimated based on the multiple observations.Ongoing research on vSLAM in GET Lab
Fast Techniques for Monocular Visual OdometryIn [1], four techniques are proposed to speedup monocular visual odometry:
1. Using an iterative 5-point method to estimate inter-frame motion.
2. Proposing a technique to track low quality features on the ground plane in order to estimate scale of motion.
3. Localization of landmarks in space based on a probabilistic triangulation method (more...).
4. Modification of the last camera pose by minimization of a cost function consisting of epipolar constraints (Sampson distances) for distant landmarks and projective constraints for close landmarks.
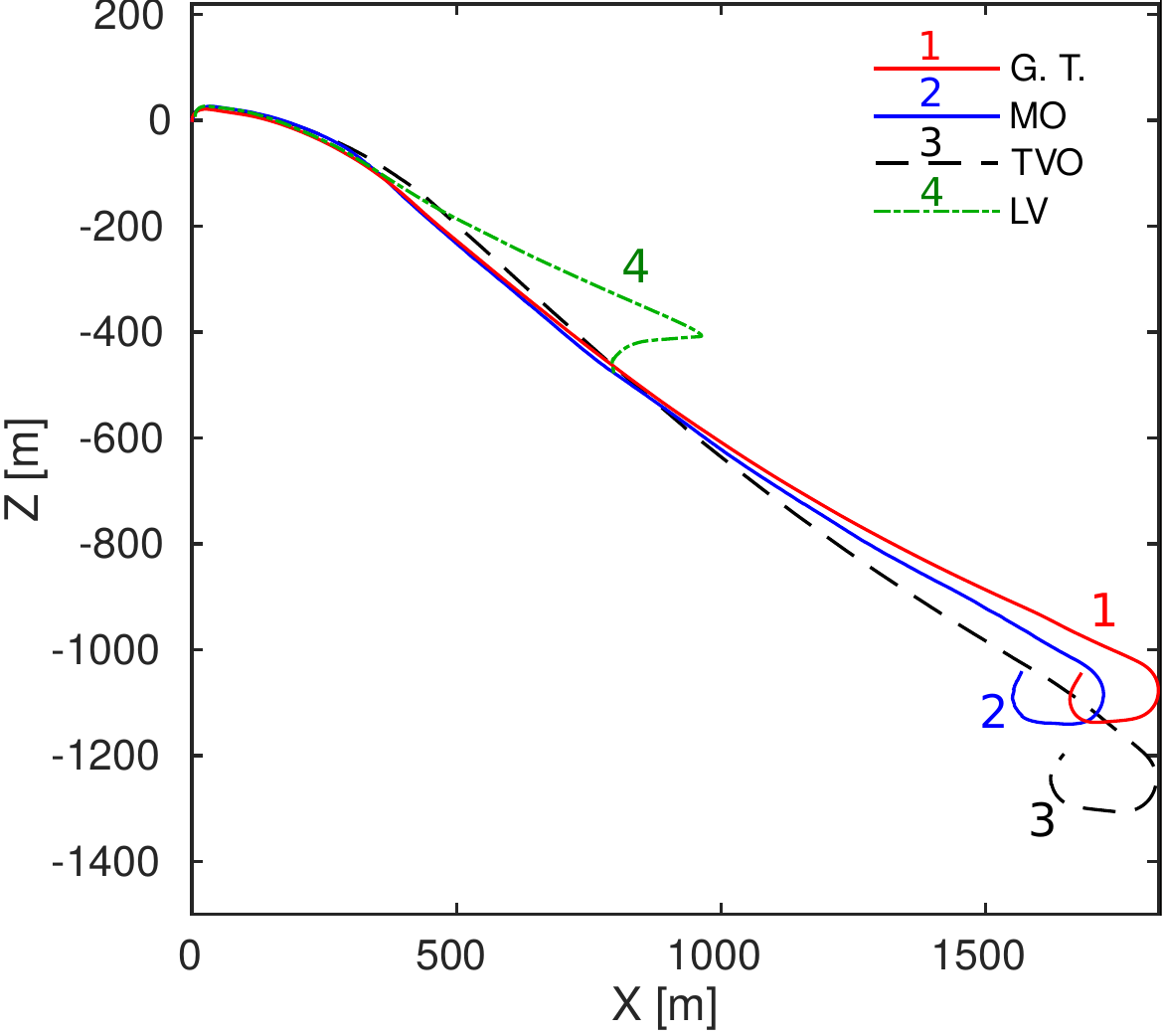
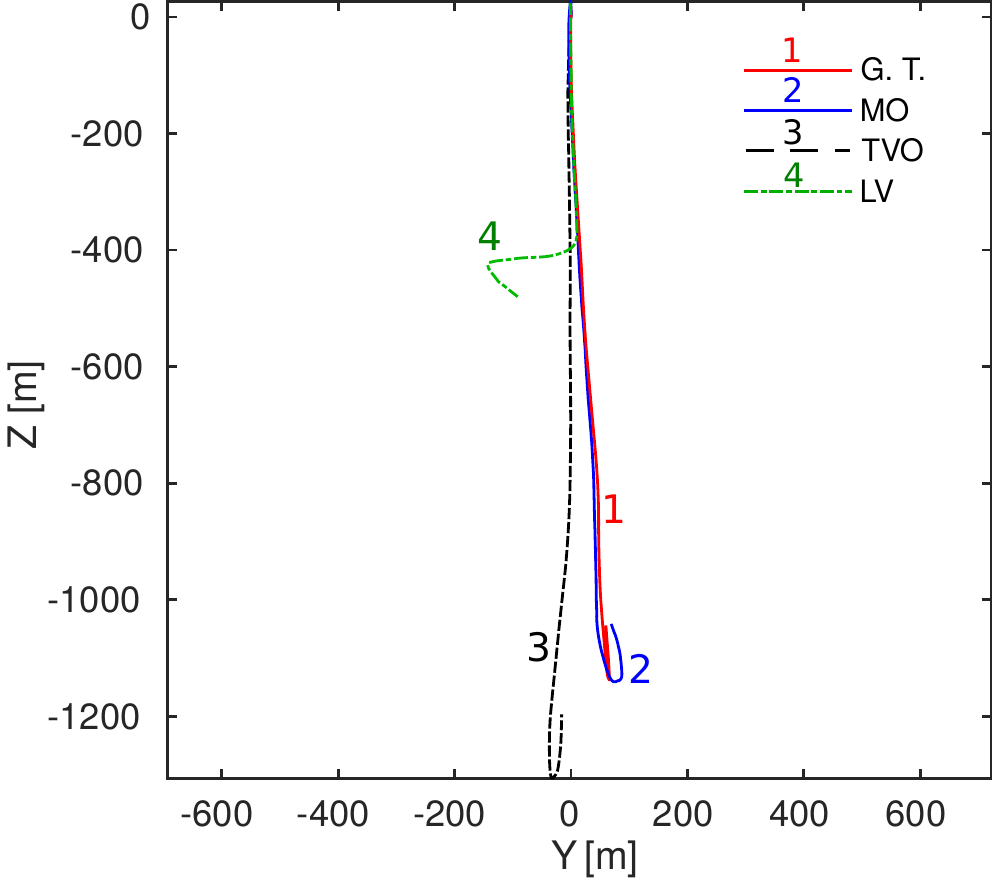
Fig1. Estimated path using the proposed method (MO), iterative 5-point method (TVO) and Libviso (LV) for the sequence 1 of the KITTI dataset.
Robust Relative Camera Pose Estimation
In [2], we developed a robust method to deal with measurement noise affecting the quality of estimation of camera motion parameters adversely. The instantaneous camera motion parameters are typically estimated using the 8-, 7- and 5- point methods. The 8-point and 7-point methods are sensitive to measurement noise and degenerate cases. The 5-point method is expensive and also suffers from numerical errors. We have modified the original methods by introducing a regularization to regularize the roll and pitch angles of rotation. In Fig. 1 the difference between the estimated path using our method (8-point-R) and the normalized 8-point method can be seen. We see that applying the regularization method yielded a great improvement in the estimation of camera poses.
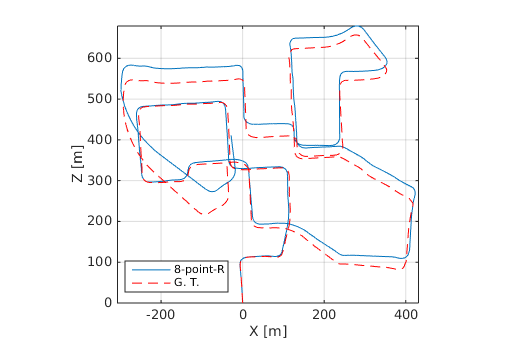
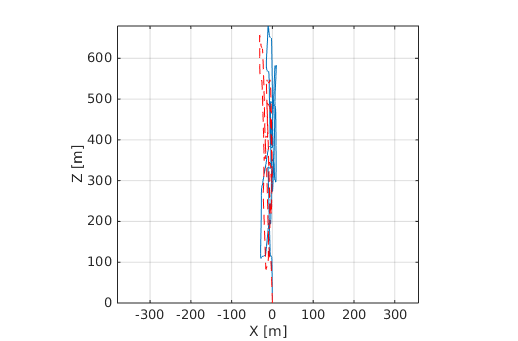
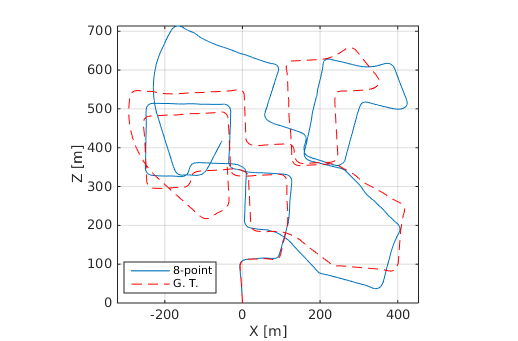
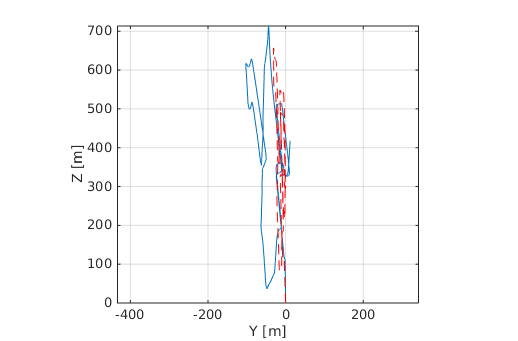
Fig2. Estimated paths using the regularized 8-point method (top) and the normalized 8-point method (bottom) for the sequence 0 of the KITTI dataset.
The paths are estimated up to the constant scale factor one.
Publications
| 1. | Mirabdollah, M. H., Mertsching, B.: Fast Techniques for Monocualr Visual Odometry. In: Proceeding of 37th German Conference on Pattern Recognition, 2015. |
| 2. | Mirabdollah, M. H., Mertsching, B.: On the Second Order Statistics of Essential Matrix Elements. In: Proceeding of 36th German Conference on Pattern Recognition, 2014. |
| 3. | Mirabdollah, M. H., Mertsching, B.: Single Camera Motion Estimation: Modification of the 8-Point Method. In: Proceeding of 6th International Conference on Intelligent Robotics and Applications, 2013. |
| 4. | Mirabdollah, M. H., Mertsching, B.: A New Non-Gaussian Filtering Approach to Monocular SLAM Problem. In: Proceeding of 6th International Conference on Intelligent Robotics and Applications, 2013. |
| 5. | Mirabdollah, M. H., Mertsching, B.: Motion Recovery of a Single Camera Installed on a Wheeled Vehicle. In: Proceeding of 10th International Conference on Image Analysis and Recognition, 2013. |