3D Simulation for Sensor Systems and Mobile Robotics
 |
 |
SummaryThe efficient development of complex algorithms for mobile robot applications is strongly facilitated by appropriate testing and validation opportunities. Simulations allow developers to virtually reproduce hardware systems and their behaviors as well as entire environments that are not physically available in the reality.In GET Lab, we are implementing SIMORE (Simulation of Multirobot Environments), a simulation framework for simulating sensors, actuators and entire robots, in virtual 3D environments. Besides implementing control strategies and synthesizing sensor data SIMORE provides additional information emanating from intrinsic object properties within a given virtual environment. SIMORE is built upon open-source libraries, such as the OpenSceneGraph toolkit for scene rendering and the Open Dynamics Engine to accomplish a solid physical behavior. It provides easy to use modeling tools and plug-ins for creating and modifying the appearance as well as the dynamic properties of objects to be included in the scene. Our simulation framework possess a module based design capable of supporting further extensions and enhancements, such as the definition of individual sensors and actuators. Beyond that, SIMORE offers exemplary interfaces for available robotic middleware applications, such as the Robot Operating System, allowing a fast and flexible transition between simulation and real hardware platforms. Although still under active development, SIMORE is used to support several research propositions in robot vision, navigation, object recognition, machine learning as well as being a proven prototyping tool for academic robotic competitions, such as the Robocup (Rescue Ligue). 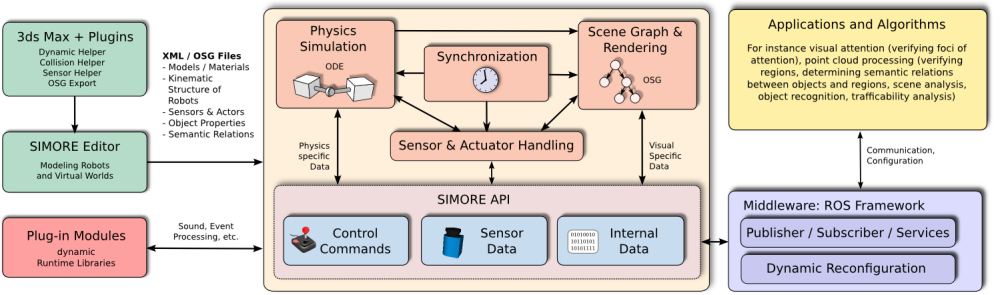
Fig. 1: The diagram illustrates the interplay of the major components in SIMORE. Autodesk's 3ds Max and its plug-ins provide the substantial models for the simulation. SIMEdit allows a configuration and annotation of existing models via meta descriptions (top left). The simulation core (top right) consists of the physics engine (ODE) and the scene rendering (OSG) whereas as both are synchronized. The SIMORE API ensures that sensor, actuator and internal data are made accessible for external applications, e.g. interfaces to middleware frame- works. Plug-in components (left center) allow individual modules that can be integrated at run-time as needed. The communication between applications and the simulator (bottom left) is primarily implemented through the middleware (bottom right) such as the Robot Operating System. 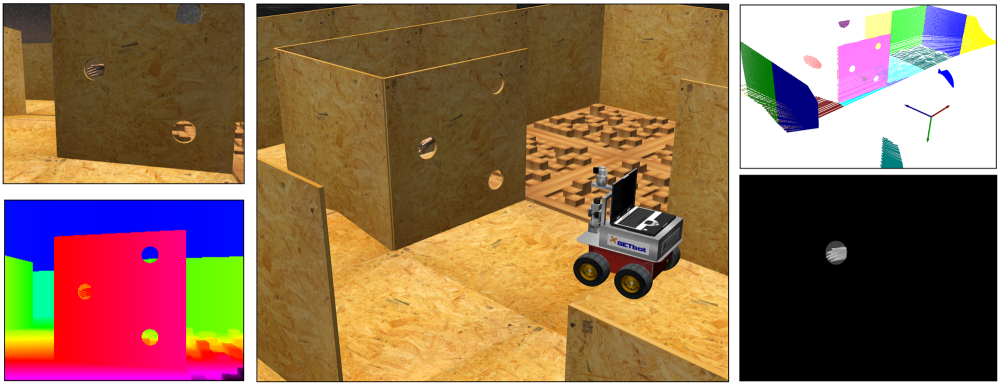
Fig 2: Sample of a simulated RoboCup Rescue scenario and synthesized sensor outputs. The figure in the center shows the user's view of the simulator. It depicts a robot that is supposed to detect victims hidden in the environment. A potential evidence of a victim's presence is given by the hand sticking out of the left hole of wall faced by the robot. The smaller figures on the outside represent the output of a standard camera (top left), a depth image (bottom left), a 3D scan with object attributions (top right) and a thermal scan of the scene (bottom right). ContactDo you have any questions or comments? Please contact: |