GET Brain - Cognitive Architecture Based on Biologically Inspired Memory
|
|
|
|
Summary
Past thirty years have been characterized by an evident progress in the field of autonomous robotics concerning the integration of new mechanical robot components, comprehensive sensors and sophisticated algorithms of artificial intelligence. The unsolved problem in this domain is still the adaptability of agents in unpredicted situations resulting from permanent autonomous learning.Biological systems such as those found in mammals exibit admirable adaptative abilities in their behavior and can serve as a potential source of inspiration for the development of technical architectures for adaptive learning. A remarkable fact in this context is the similarity in the functionality of the main brain circuits and the principles of information processing in mammalian brains. Recent profound neuroscientific findings concerning organization of the brain confirm the remarkable role of memory structures in its functionality. The structures build the base for information processing and are required for all kinds of cognitive processes.
The GET Brain project focuses on the development of the cognitive architecture which is predominantly substantiated by data processing principles of biologically inspired multiple memory systems. Several projects have already dealt with modeling of single aspects of biological memory structures. Our project aims at the high-level modeling of the entire interrelated configuration of multiple kinds of memory structures including the inherent methods which are conducive to the generation of memory content, generalization of data and their mutual use for learning and adaptation. The current memory configuration involves the incipiently simplified realizations of long term and working memory units.
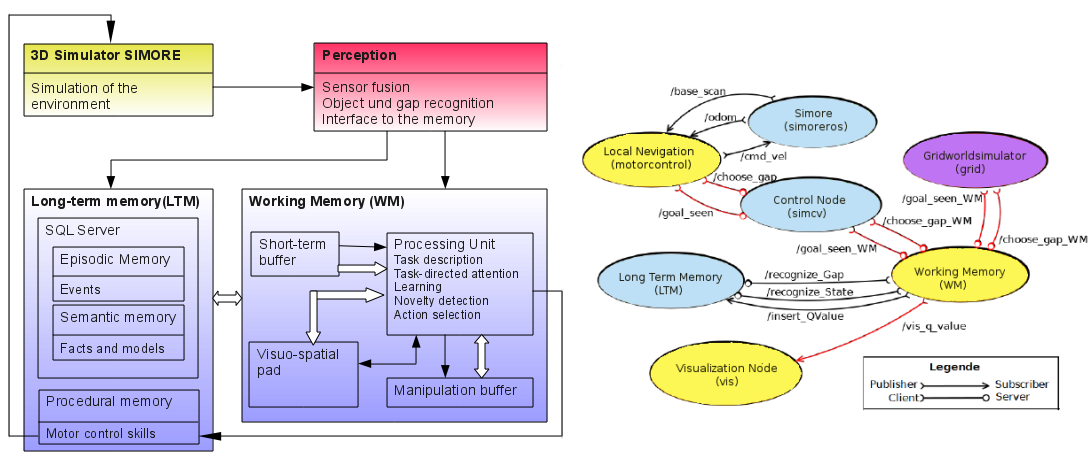
Development and evaluation of learning processes related to the memory structures are accomplished with the assistance of physically based 3D simulation frame SIMORE, which has been developed at the GET Lab. SIMORE tools allow the realization of the robotic environment with different object types and surrounding structures.
The Robot Operation System (ROS) was used as a base for the implementation of memory units and their intercommunication. The ROS provides a framework for the development of robot software and allows, if necessary, the distribution of software units on a heterogeneous computer cluster. The system can be envisioned as the structure with independent processing nodes (memory or service units) which can concurrently send and receive messages or carry out the clocked communication using the operating system-like functionality of the ROS.
The essential precondition of an effective learning is novelty detection. Hereby, for learning only the novel objects, situations, actions and their sequences are obtained by the brain. The most important regions of the brain involved in processing of novelty are the prefrontal cortex (whehe the working memory(WM) is located) and the hippocampus (which is the site of episodic memory(EM)). The anatomic circuitry of the hippocampus is specialized to effectively compare already saved and currently incoming information. The exploration of brain responses using functional magnetic resonance imaging(MRI) show the existence of associative match-mismatch computations in the human hippocampus. The realization of flexible novelty detection in GETBrain system is based on the interaction between the working and long term memory. The EM provides the data required for computing the task-dependent novelty when triggered by the WM's executive unit. of the WM's executive unit.
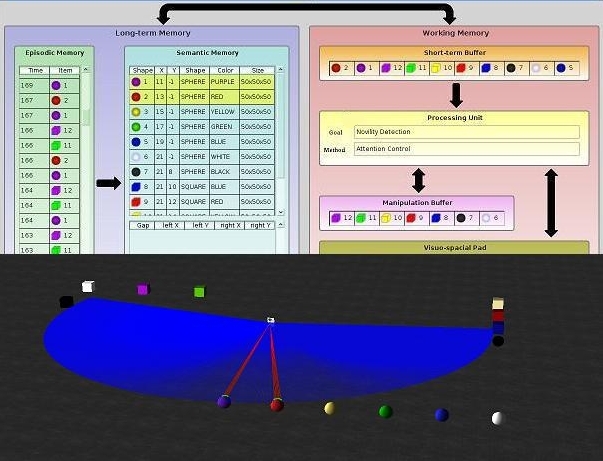
The tests of our system were carried out in the rescue robot domain. Here, the robot operates in a simplified world containing two kinds of semantic elements: objects and gaps. We use a modified high-level reinforcement learning approach and generalization of gathered knowledge for maze navigation and victims search in our tests.